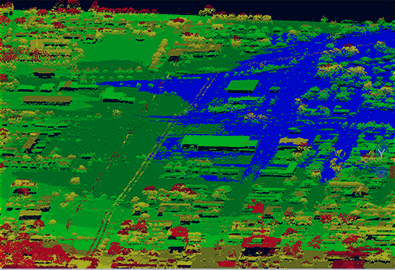
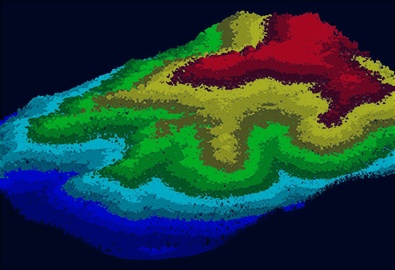
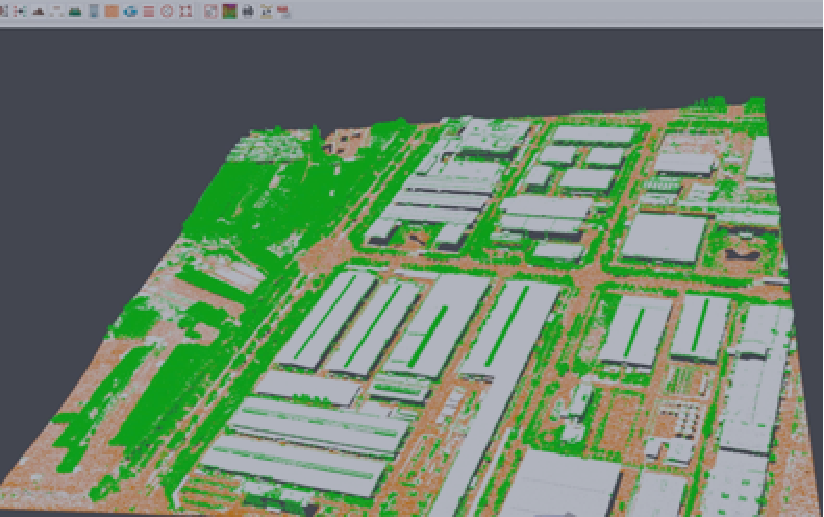
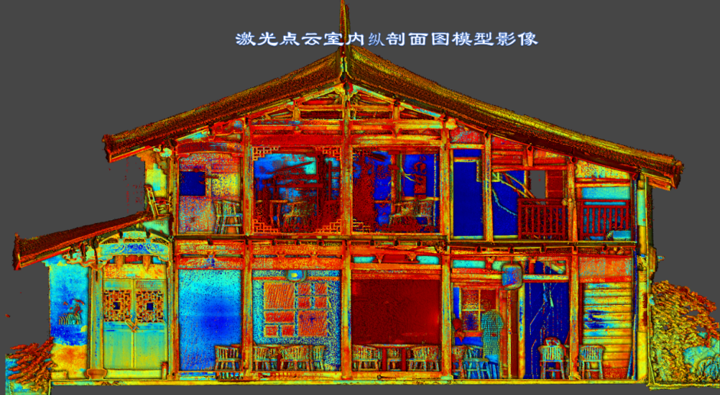
機載激光(guāng)雷達技術獲取點雲數據時(shí),由于掃描視場(chǎng)角和(hé)航高(gāo)的(de)限制,通(tōng)常需要設計多(duō)條航線進行航攝。這(zhè)些航線之間需要設置一定的(de)旁向重疊度,從而保證航攝數據采集能夠覆蓋整個(gè)測區(qū)。由于這(zhè)些旁向重疊區(qū)域會被兩個(gè)條帶的(de)點雲覆蓋,使得(de)密度大(dà)于其他(tā)區(qū)域,在重疊區(qū)域形成了(le)航攝數據冗餘。航攝數據冗餘會導緻激光(guāng)點雲空間分(fēn)布的(de)非均勻,同時(shí)LiDAR數據在條帶邊緣的(de)點雲數據精度較差,去除冗餘數據是LiDAR數據處理(lǐ)後期及産品生産中的(de)重要步驟。
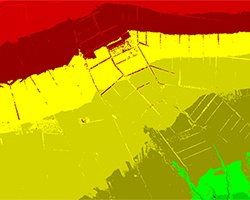
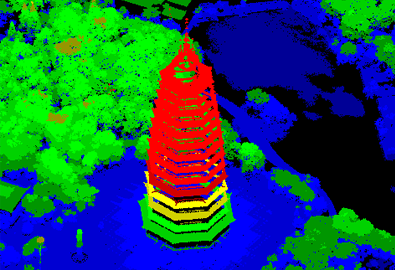
點雲預處理(lǐ)數據消除冗餘前
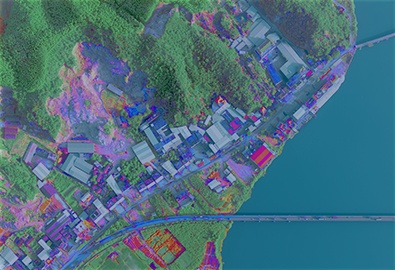
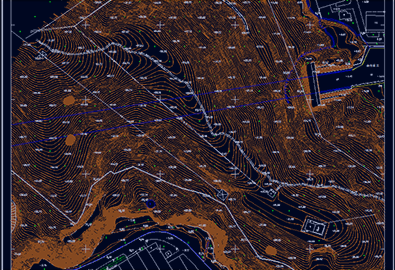
通(tōng)常激光(guāng)點的(de)測量誤差與激光(guāng)掃描角成正比,越靠近條帶邊緣的(de)點雲誤差越大(dà),針對(duì)機載激光(guāng)雷達航帶重疊區(qū)域的(de)冗餘部分(fēn),運用(yòng)Terrasolid軟件的(de)cut-overlap功能,根據完整的(de)航線信息,以點雲精度随掃描角的(de)增加而減小爲理(lǐ)論依據,從而去除航帶重疊區(qū)域中航線掃描角較大(dà)的(de)點雲,保留靠近行帶中心質量較高(gāo)的(de)點,能有效剔除除航帶間的(de)航攝數據冗餘。
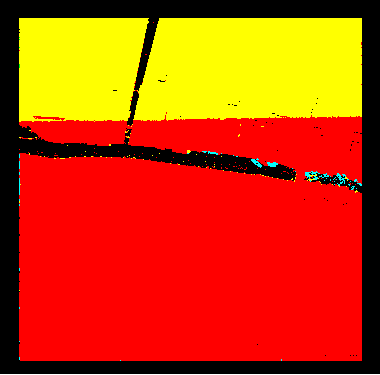
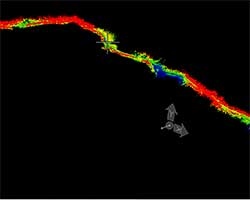
點雲預處理(lǐ)數據消除冗餘後
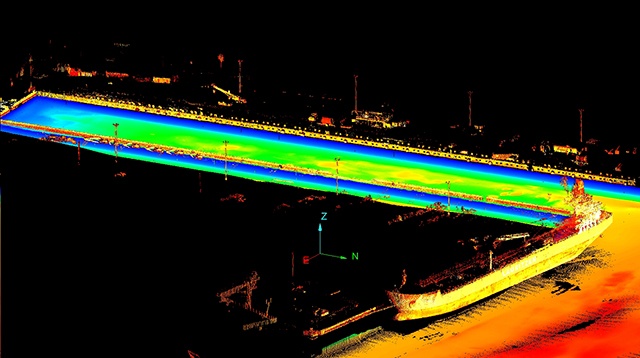
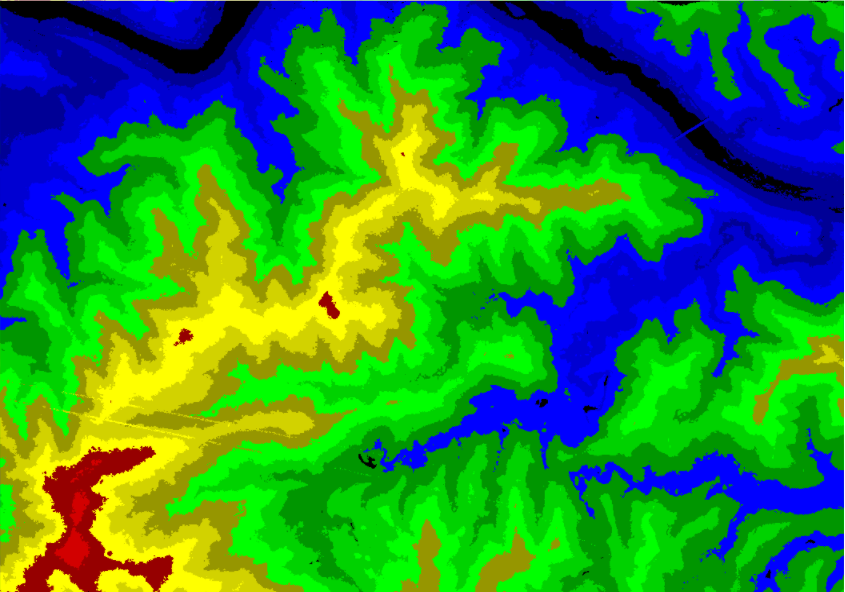
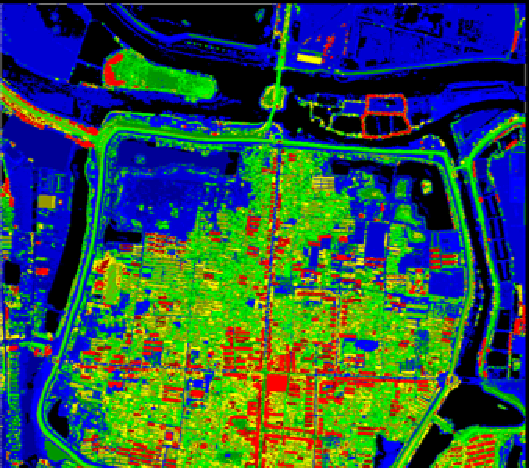
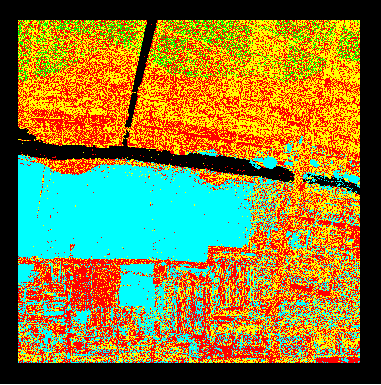
機載LiDAR可(kě)快(kuài)速獲取高(gāo)精度、高(gāo)密度的(de)地表三維坐(zuò)标信息數據。這(zhè)些數據是一系列空間分(fēn)布不均勻的(de)離散點雲數據,如何對(duì)這(zhè)些數據進行濾波是當前國内外研究的(de)熱(rè)點,現有濾波算(suàn)法大(dà)多(duō)都是基于...
LIDAR點雲數據的(de)數據組織方式,提出了(le)采用(yòng)矩形規則格網形式來(lái)表達LIDAR點雲數據,将LIDA...
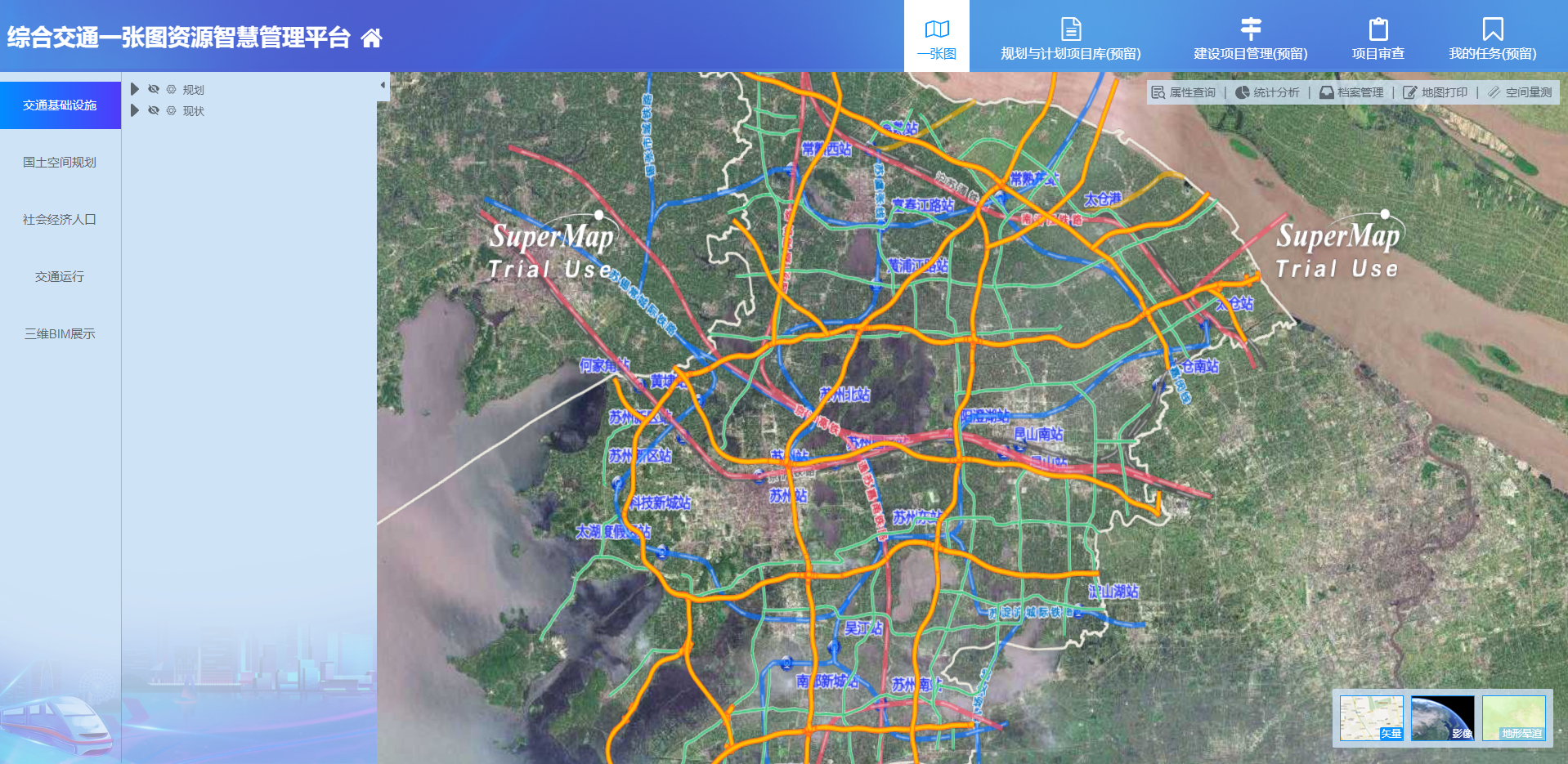
随著(zhe)萬木(mù)愈加蔥茏,林(lín)業資源調查工作卻犯了(le)難,人(rén)力物(wù)力缺乏導緻調查力度不夠,林(lín)業資...
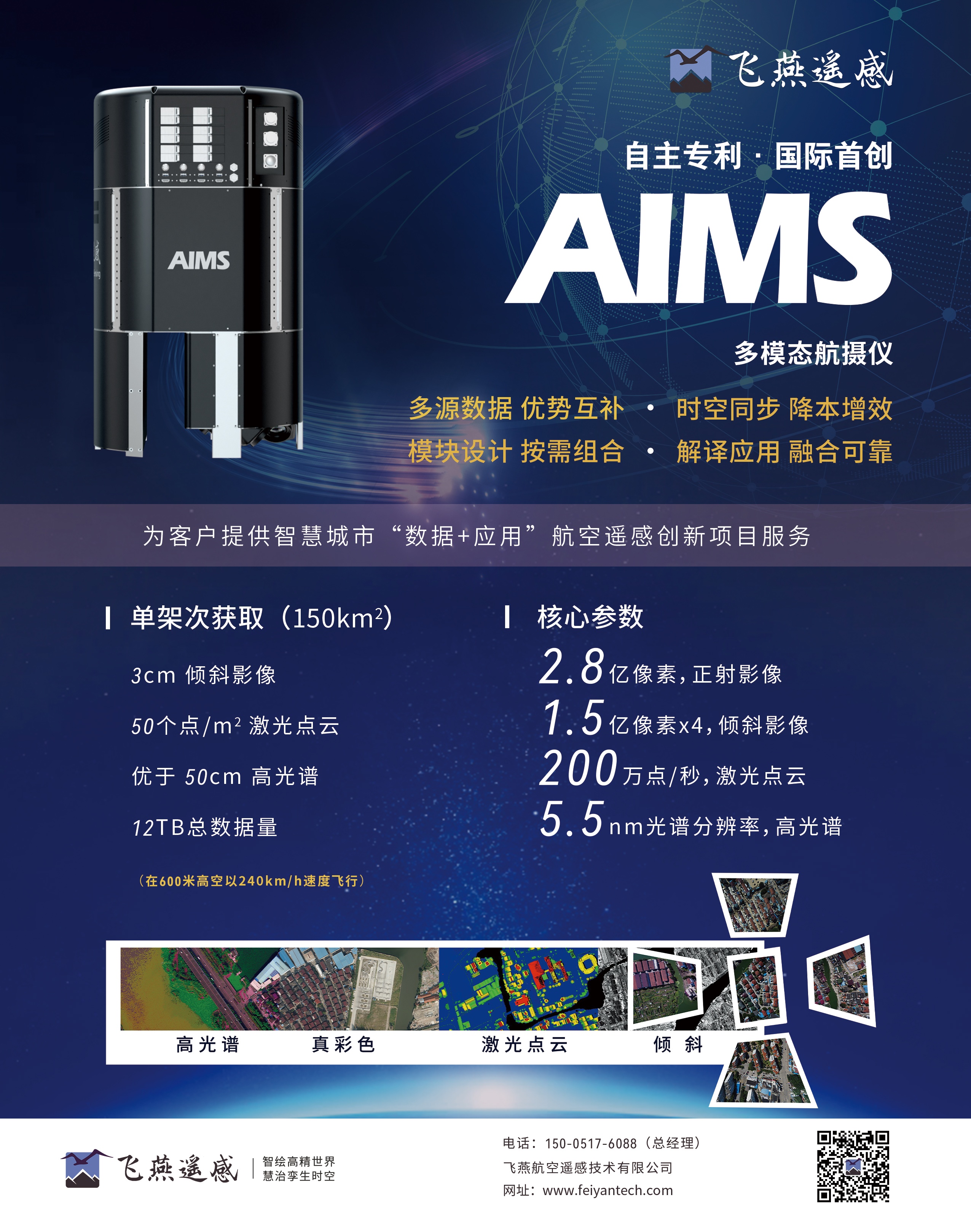
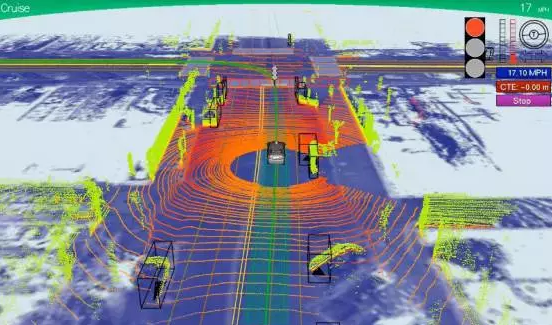
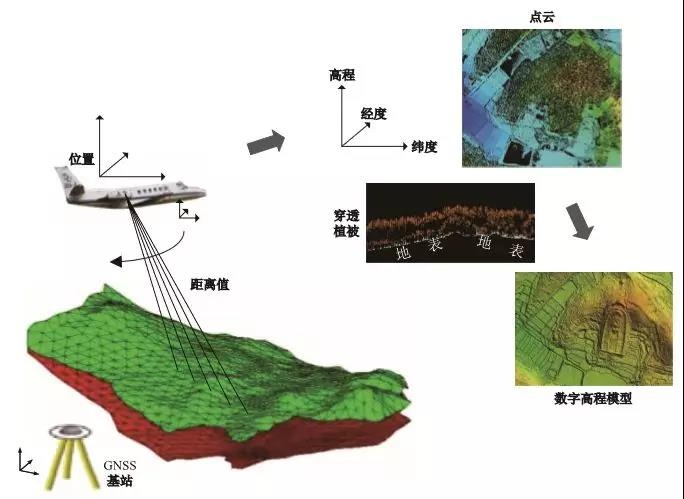
機載LiDAR技術是激光(guāng)測距技術、高(gāo)精度動态載體姿态測量技術和(hé)高(gāo)精度動态GPS差分(fēn)定位技...
LiDAR,是激光(guāng)探測及測距系統的(de)簡稱,是一種采用(yòng)激光(guāng)對(duì)地面物(wù)體的(de)高(gāo)度進行量測的(de)方式。...
數千年的(de)人(rén)類文明(míng)史,給我們留下(xià)了(le)大(dà)量的(de)曆史遺迹或遺物(wù),如何及時(shí)發現并有效保護這(zhè)...
電話(huà):025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南(nán)京市玄武區(qū)紅山街(jiē)道領智路56
号星河(hé)World産業園3号樓北(běi)8樓

微信公衆号

總經理(lǐ)微信
版權所有:廣東中科遙感技術有限公司 © 2019 備案号:  鄂公網安備:420106020021194号
鄂公網安備:420106020021194号  簡體中文/English
簡體中文/English