航空攝影(yǐng)測量的(de)主題,是将地面的(de)中心投影(yǐng)(航攝像片)變換爲正射投影(yǐng)(地形圖)。這(zhè)一問題可(kě)以采取許多(duō)途徑來(lái)解決。如圖解法、光(guāng)學機械法(亦稱模拟法)和(hé)解析法等。在每一種方法中還(hái)可(kě)細分(fēn)出許多(duō)具體方法,而每種具體方法又有其特有的(de)理(lǐ)論。其中有些概念和(hé)理(lǐ)論是基礎性的(de),帶有某些共性,如像片的(de)内方位元素和(hé)外方位元素,像點同地面點的(de)坐(zuò)标關系式,共線條件方程,像對(duì)的(de)相對(duì)定向,模型的(de)絕對(duì)定向和(hé)立體觀測原理(lǐ)等。
内方位元素用(yòng)以确定攝影(yǐng)物(wù)鏡後節點(像方)同像片間的(de)相關位置。利用(yòng)它可(kě)以恢複攝影(yǐng)時(shí)的(de)攝影(yǐng)光(guāng)線束。内方位元素系指攝影(yǐng)機主距 f和(hé)攝影(yǐng)機物(wù)鏡後節點在像平面的(de)正投影(yǐng)位于框标坐(zuò)标系中的(de)坐(zuò)标值(x0,у0)。這(zhè)些數值通(tōng)過對(duì)航攝機鑒定得(de)出,故内方位元素總是已知的(de)。
确定攝影(yǐng)光(guāng)線束在攝影(yǐng)時(shí)的(de)空間位置的(de)數據,叫做(zuò)像片或攝影(yǐng)的(de)外方位元素。外方位元素有6個(gè)數值,包括攝影(yǐng)中心S在某一空間直角坐(zuò)标系中的(de)3個(gè)坐(zuò)标值Xs、Ys、Zs和(hé)用(yòng)來(lái)确定攝影(yǐng)光(guāng)線束在空間方位的(de)3個(gè)角定向元素,如φ、ω、k角。這(zhè)些外方位元素都是針對(duì)著(zhe)某一個(gè)模型坐(zuò)标系O-XYZ而定義的(de)。模型坐(zuò)标系的(de)X坐(zuò)标軸近似地位于攝影(yǐng)的(de)基線方向,Z坐(zuò)标軸近似地與地面點的(de)高(gāo)程方向相符。在模型坐(zuò)标系内所建立的(de)立體模型必須在其後經絕對(duì)定向的(de)過程才能取得(de)立體模型的(de)正确方位。
像點ɑ在以攝影(yǐng)中心S爲原點,攝影(yǐng)主光(guāng)軸z坐(zuò)标軸的(de)像空間坐(zuò)标系(S-xуz)中的(de)坐(zuò)标爲xɑ、уɑ、zɑ=-f。此時(shí)以S爲原點再建立一個(gè)輔助坐(zuò)标系(S-uvw)其中3個(gè)坐(zuò)标軸u、v、w分(fēn)别與模型坐(zuò)标的(de)3個(gè)坐(zuò)标軸X 、Y、Z相平行。ɑ點在此輔助坐(zuò)标系中的(de)坐(zuò)标設爲uɑ、vɑ、wɑ,則其變換關系式爲:

R爲旋轉矩陣,它是由像空間坐(zuò)标系與輔助坐(zuò)标系的(de)相應坐(zuò)标軸間夾角的(de)餘弦(稱方向餘弦)組成,而這(zhè)些方向餘弦都是像片的(de)3個(gè)角定向元素的(de)函數。這(zhè)是一個(gè)重要的(de)基本公式,因爲有很多(duō)理(lǐ)論公式或作業公式就是在此基礎上進一步演化(huà)得(de)出的(de)。例如,在解析攝影(yǐng)測量中有廣泛應用(yòng)的(de)“共線條件方程式”,就是根據它的(de)反算(suàn)式作進一步演化(huà)得(de)出。
确定像片對(duì)相互位置關系的(de)過程。模拟法相對(duì)定向是在立體測圖儀上進行。其理(lǐ)論基礎是使空間所有的(de)同名光(guāng)線都成對(duì)相交。當同名光(guāng)線不相交時(shí),則在儀器的(de)觀測系統中可(kě)以觀察到上下(xià)視差(常用(yòng) Q表示)。上下(xià)視差就是兩條同名射線在空間不相交時(shí)在垂直于攝影(yǐng)基線方向中存在的(de)距離。此時(shí)将投影(yǐng)器作微小的(de)直線移動或轉動,就可(kě)以消除這(zhè)個(gè)距離。理(lǐ)論上隻要能夠在适當分(fēn)布的(de) 5個(gè)點處同時(shí)消除該點處的(de)上下(xià)視差,就認爲已經獲得(de)在這(zhè)個(gè)立體像對(duì)内全部上下(xià)視差的(de)消除,從而完成了(le)相對(duì)定向,得(de)出立體模型。相對(duì)定向的(de)解析法是在像片上量測各同名像點的(de)像點坐(zuò)标,例如對(duì)左像片爲x1、у1,對(duì)右像片爲x2、у2。根據同名射線共面條件的(de)理(lǐ)論可(kě)以推導出這(zhè)些量測值與相對(duì)定向元素的(de)關系式。理(lǐ)論上測得(de)5對(duì)同名像點的(de)像點坐(zuò)标值,就能夠解算(suàn)出該像片對(duì)的(de) 5個(gè)相對(duì)定向元素。同名點在左右像片上的(de)縱坐(zuò)标差(у1-у2)習(xí)慣上也(yě)稱之爲上下(xià)視差,用(yòng)符号q 表示。
在攝影(yǐng)測量中,相對(duì)定向所建立的(de)立體模型常處在暫時(shí)的(de)或過渡性的(de)模型坐(zuò)标系中,而且比例尺也(yě)是任意的(de),因此必須把它變換至地面測量坐(zuò)标系中,并使符合規定的(de)比例尺,方可(kě)測圖,這(zhè)個(gè)變換過程稱爲絕對(duì)定向。絕對(duì)定向的(de)數學基礎是三維線性相似變換,它的(de)元素有7個(gè),3個(gè)坐(zuò)标原點的(de)平移值,3個(gè)立體模型的(de)轉角值和(hé)1個(gè)比例尺縮放率。

立體觀察的(de)原理(lǐ)是建立人(rén)造立體視覺,即将像對(duì)上的(de)視差反映爲人(rén)眼的(de)生理(lǐ)視差後得(de)出的(de)立體視覺。得(de)到人(rén)造立體視覺須具備3個(gè)條件:①由兩個(gè)不同位置(一條基線的(de)兩端)拍(pāi)攝同一景物(wù)的(de)兩張像片(稱爲立體像對(duì)或像對(duì));②兩隻眼睛分(fēn)别觀察像對(duì)中的(de)一張像片;③觀察時(shí)像對(duì)上各同名像點的(de)連線要同人(rén)的(de)眼睛基線大(dà)緻平行,而且同名點間的(de)距離一般要小于眼基線(或擴大(dà)後的(de)眼基距)。若用(yòng)兩個(gè)相同标志分(fēn)别置于左右像片的(de)同名像點上,則立體觀察時(shí)就可(kě)以看到在立體模型上加入了(le)一個(gè)空間的(de)測标。爲便于立體觀察,可(kě)借助于一些簡單的(de)工具,如橋式立體鏡和(hé)反光(guāng)立體鏡。對(duì)于那種利用(yòng)兩個(gè)投影(yǐng)器把左右像片的(de)影(yǐng)像同時(shí)疊合地投影(yǐng)在一個(gè)承影(yǐng)面上的(de)情況,可(kě)采用(yòng)互補色原理(lǐ)或偏振光(guāng)原理(lǐ)進行立體觀察,并用(yòng)一個(gè)具有測标的(de)測繪台量測。

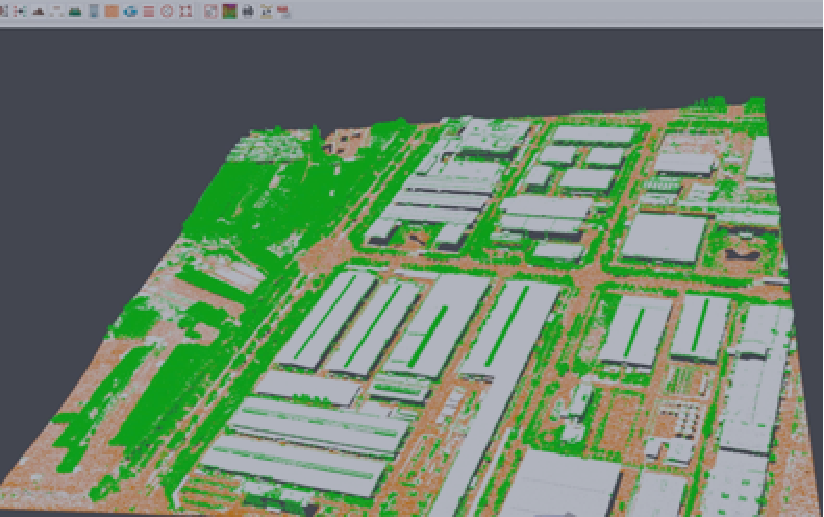
該成果的(de)成功使用(yòng),在廈門地區(qū)形成了(le)長(cháng)效機制,成爲了(le)政府基礎決策,證明(míng)了(le)航空遙感測繪作爲“天上看、地上查、網上管”科技控違的(de)關鍵數據。此次獲獎,是福建省測繪地理(lǐ)信息學會對(duì)我...

過去,森林(lín)資源調查以人(rén)工地面調查爲主,不僅耗時(shí)久、效率低,數據精度也(yě)不高(gāo)。現在,...

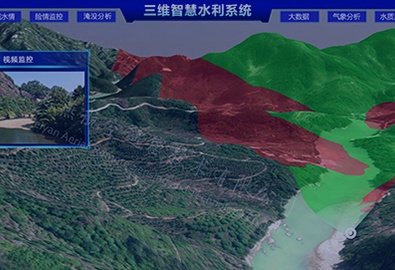
景三維作爲真實、立體、時(shí)序化(huà)反映人(rén)類生産、生活和(hé)生态空間的(de)時(shí)空信息,是國家重要的(de)...
2021年,飛(fēi)燕遙感憑借豐富的(de)航攝經驗與百人(rén)數據處理(lǐ)團隊,承接了(le)安徽省基礎地理(lǐ)信息數...

該設備是目前國内唯一實現了(le)正射真彩色影(yǐng)像航攝儀、激光(guāng)雷達航攝儀、傾斜攝影(yǐng)航攝儀、...

近日,由廣東中科遙感技術有限公司自主研發的(de)航空集成多(duō)傳感器航攝儀AIMS在“數字中國...
電話(huà):025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南(nán)京市玄武區(qū)紅山街(jiē)道領智路56
号星河(hé)World産業園3号樓北(běi)8樓

微信公衆号

總經理(lǐ)微信
版權所有:廣東中科遙感技術有限公司 © 2019 備案号:  鄂公網安備:420106020021194号
鄂公網安備:420106020021194号  簡體中文/English
簡體中文/English