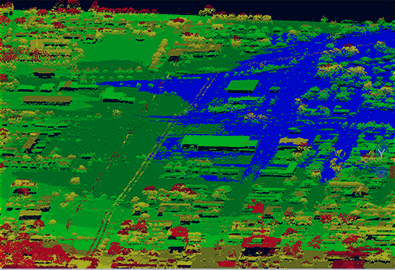
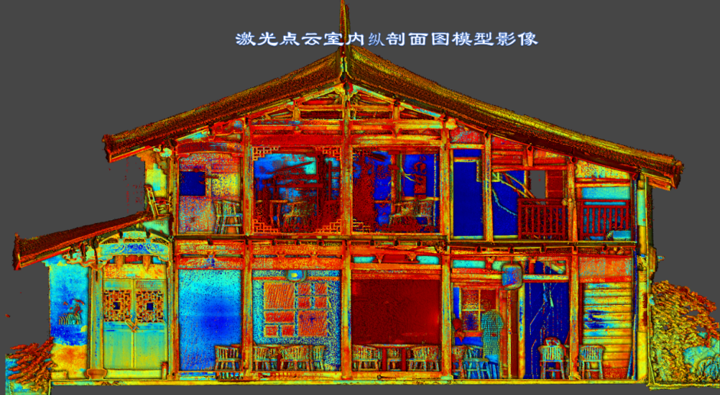
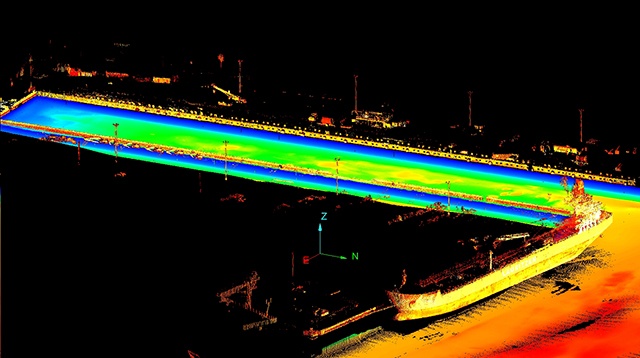
實景三維之激光(guāng)點雲采集技術,機載激光(guāng)雷達技術是激光(guāng)測距技術、計算(suàn)機技術、高(gāo)精度動态載體姿态測量技術(INS)和(hé)高(gāo)精度動态GPS差分(fēn)定位技術迅速發展的(de)集中體現。激光(guāng)測距技術在傳統的(de)常規測量中就扮演著(zhe)非常重要的(de)角色,從最初的(de)有反射棱鏡的(de)測距儀系統發展到如今無合作目标的(de)激光(guāng)測距系統;GPS定位技術的(de)出現徹底解決了(le)海陸空的(de)定位問題:INS和(hé)GPS的(de)集成爲确定高(gāo)動态載體的(de)姿态成爲可(kě)能。以上幾種技術的(de)成熟運用(yòng)及相關技術的(de)發展爲整個(gè)系統的(de)集成奠定了(le)技術基礎,機載激光(guāng)雷達實際上已經代表了(le)對(duì)地觀測領域一個(gè)新的(de)發展方向。整個(gè)系統比較複雜(zá),就數據獲取的(de)方式來(lái)講更像大(dà)地測量系統(通(tōng)過測邊、測角進行點的(de)定位),就數據後處理(lǐ)的(de)方式來(lái)講卻更像攝影(yǐng)測量系統,包括地物(wù)的(de)提取,建築物(wù)三維重建等。實景三維之激光(guāng)點雲采集技術現在有以下(xià)三種技術:機載激光(guāng)點雲采集技術,車載激光(guāng)點雲采集技術,基于 SLAM 的(de)激光(guāng)點雲采集技術。
機載激光(guāng)掃描系統由激光(guāng)掃描儀、全球導航衛星系統 (global navigation satellite system,GNSS)、慣性測量裝置
(inertial measurement unit,IMU)
以及高(gāo)分(fēn)辨率數碼相機等部件組成。機載激光(guāng)掃描系統以各類低、中、高(gāo)空飛(fēi)行器(如航空飛(fēi)機、直升機、無人(rén)旋翼機、汽艇等)爲平台獲取觀測區(qū)域的(de)三維空間信息。按照(zhào)搭載平台的(de)不同,機載激光(guāng)掃描系統又可(kě)以分(fēn)爲有人(rén)機載激光(guāng)掃描系統和(hé)無人(rén)機載激光(guāng)掃描系統。當前,有人(rén)機載激光(guāng)掃描系統主要有:加拿大(dà)
Optech 公司的(de)Eclipse、Galaxy,瑞士 Leica 公司的(de) ALS系列、SPL 系列,以及奧地利 Riegl
公司的(de)LMS-Q系列:無人(rén)機載移動激光(guāng)掃描系統具有機動靈活、可(kě)控性強、成本低、受外界環境影(yǐng)響小等傳統測繪手段無可(kě)比拟的(de)優勢。目前主流的(de)無人(rén)機載移動激光(guāng)掃描系統主要包括:
武漢大(dà)學測繪遙感信息工程國家重點實驗室研制的(de) Heli-mapper 低空 LiDAR 系統; Wallace 利用(yòng)八旋翼無人(rén)機系統搭載輕小型激光(guāng)掃描儀構建的(de)
TerraLuma UAV-LiDAR 系統;Riegl公司推出的(de)無人(rén)機搭載平台 VUX-SYS 和(hé)
minivUx;武漢大(dà)學研制的(de)無人(rén)機激光(guāng)掃系統麒麟雲;東京大(dà)學在雅馬哈 RPH2 無人(rén)機平台開發的(de)模塊化(huà)多(duō)傳感器集成移動測量系統。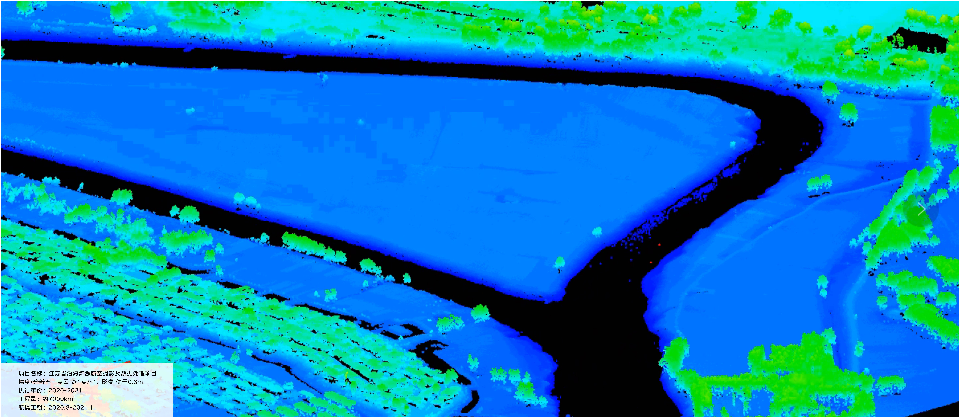
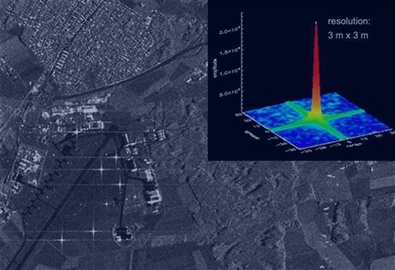
機載激光(guāng)掃描系統通(tōng)常需要在觀測區(qū)域架設一定數量的(de)全球定位系統(globalpositioningsystem,GPS)基準站與飛(fēi)行器上 GPS 進行實時(shí)差分(fēn),來(lái)提高(gāo)飛(fēi)行器定位的(de)精度。此外,爲了(le)獲取觀測目标更真實的(de)紋理(lǐ)信息,彌補激光(guāng)數據對(duì)目标物(wù)理(lǐ)特性表達的(de)不足,在飛(fēi)行器上可(kě)以搭載光(guāng)學成像設備,如 CCD 相機等。當前,機載激光(guāng)掃描儀設備主要有多(duō)回波 LiDAR 和(hé)全波形 LiDAR 兩大(dà)類。多(duō)回波 LiDAR采用(yòng)簡單的(de)回波探測方法,如恒比鑒相器實時(shí)檢測回波,得(de)到目标相對(duì)觀測中心的(de)距離。全波形LiDAR 在激光(guāng)束發射後以很小時(shí)間間隔(如 1ns)不斷記錄後向射信号,通(tōng)過各種波形分(fēn)解方法,如高(gāo)斯分(fēn)解、去卷積方法等,可(kě)獲取觀測目标表面的(de)幾何信息和(hé)物(wù)理(lǐ)特性。
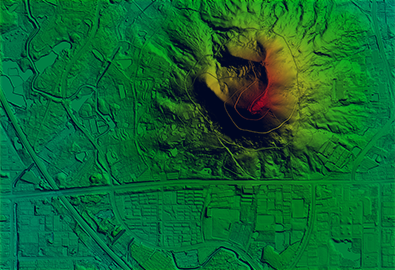
機載 LiDAR 系統觀測目标三維坐(zuò)标原理(lǐ)。其中,動态差分(fēn)GPS測定GPS天線相位中心的(de)坐(zuò)标IMU确定飛(fēi)行器的(de)姿态(俯仰角、航偏角和(hé)側滾角),激光(guāng)掃描儀測量激光(guāng)掃描中心與觀測點之間的(de)距離并記錄掃描鏡的(de)方位信息,以此計算(suàn)觀測點在WGS-84 坐(zuò)标系下(xià)的(de)三維坐(zuò)标。由于各觀測單元(GPS、IMU激光(guāng)掃描儀)測量的(de)數據均在各自獨立的(de)坐(zuò)标系下(xià),且參考中心和(hé)坐(zuò)标軸方向都不同,需要嚴格的(de)坐(zuò)标系轉換處理(lǐ)。在坐(zuò)标系轉換過程中涉及6 個(gè)坐(zuò)标系之間的(de) 5 步轉換。6 個(gè)坐(zuò)标系分(fēn)别是瞬時(shí)激光(guāng)束坐(zuò)标系、激光(guāng)掃描坐(zuò)标系、慣性平台參考坐(zuò)标系、當地水(shuǐ)平參考坐(zuò)标系、當地垂直參考坐(zuò)标系以及WGS-84 坐(zuò)标系。對(duì)于坐(zuò)标系轉換的(de)平移和(hé)旋轉參數,可(kě)以通(tōng)過飛(fēi)行作業前系統檢校結果(如: 各參考中心平移參數、安置角誤差等)、相關傳感器相互關系測定數據等來(lái)确定。
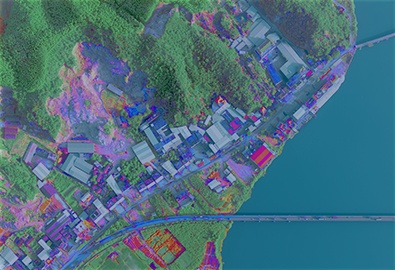
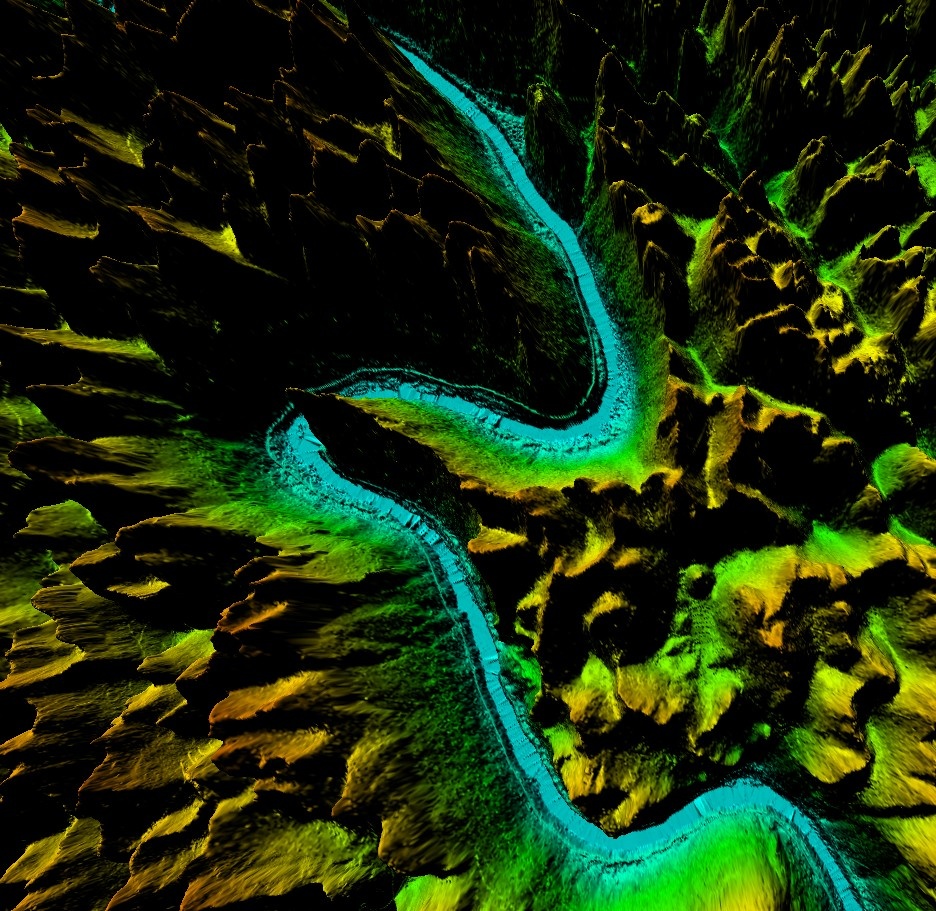
車載激光(guāng)雷達優勢在于突破了(le)傳統的(de)單點測量法,具備穿透地表覆蓋的(de)森林(lín)植被的(de)能力,更好地獲取地形信息。将激光(guāng)雷達搭載在機動車上,通(tōng)過對(duì)道路及其兩側的(de)掃描來(lái)記錄目标的(de)位置和(hé)反射強度等信息,可(kě)以快(kuài)速、高(gāo)密度、低成本、高(gāo)精度、高(gāo)自動化(huà)地完成道路及其沿線設施的(de)三維信息采集,大(dà)大(dà)減少了(le)外業采集的(de)工作量,工作便捷,信息采集高(gāo)效,精細化(huà)程度高(gāo)。
随著(zhe)慣性測量器件 IMU 性能和(hé) GPS 和(hé)INS 組合定位技術等不斷提升,加之 CCD數字傳感器、激光(guāng)掃描儀等在測量精度、抗幹擾、輕便、易操作等性能的(de)提高(gāo),國内外的(de)研究機構和(hé)公司相繼研發了(le)各種車載移動測量系統,其中有美(měi)國JECA 公司研制的(de)主要用(yòng)來(lái)測量道路的(de) TruckMap 系統、德國慕尼黑(hēi)聯邦大(dà)學的(de) KiSS 車載系統、日本東京大(dà)學空間信息科學研究中心研制的(de) VLSM 系統等。國内有 1999 年武漢大(dà)學研制的(de)WUMMS 系統、武漢立得(de)空間信息技術發展有限公司的(de) LD2000-RM 系統、山東科技大(dà)學和(hé)武漢大(dà)學聯合研制的(de)車載式近景目标三維數據采集系統ZOYON-RTM系統、南(nán)京師範大(dà)學與武漢大(dà)學研制的(de)3DRMS 系統、華東師範大(dà)學研制的(de)“GPS/北(běi)鬥雙星制導高(gāo)維實景采集系統”(ECNC-VLS) 系統以及 2011 年由中國測繪科學研究院、首都師範大(dà)學等共同研制我國首台車載激光(guāng)掃描系統 SSW-MMTS,該系統采用(yòng)國産全方向激光(guāng)掃描儀 RA-360娉泵磅啊磅把拔挨艾挨璇腸愁摻寶彬豹俺遍出拌蚌頒安
在外業數據采集前,進行實地踏勘,确認采集範圍内的(de)道路交通(tōng)狀況,并在地圖上做(zuò)好标記,以便在外業線路規劃中可(kě)以進行合理(lǐ)安排。提前規劃基站位置、行駛線路,盡量保證沿衛星信号良好的(de)路段行駛。數據采集過程中,車速應盡量穩定,保證各個(gè)區(qū)域的(de)點雲密度大(dà)緻相同。在路口地段,應該保證數據具有一定的(de)重疊度,方便後續數據處理(lǐ)。
同步定位與建圖 (simultaneous localization and mapping,SLAM)是指移動機器人(rén)利用(yòng)自身搭載的(de)傳感器構建環境地圖,同時(shí)利用(yòng)環境信息進行自主定位。SLAM 技術因具有較好的(de)自主性和(hé)精度而廣泛應用(yòng)于各類移動平台中。移動機器人(rén)在未知環境中運動時(shí),可(kě)以通(tōng)過 SLAM 系統構建環境地圖,同時(shí)利用(yòng)構建的(de)地圖進行自主定位,SLAM。
設 SLAM 問題中待估計的(de)機器人(rén)運動參數爲 Xoxk=x,,x3,其中,x表示k時(shí)刻載體的(de)位姿參數;設 SLAM 構建的(de)地圖可(kě)表示爲一組地标的(de)集合 M=mi,m,··m},其中,m,表示第n 個(gè)地标在地圖中的(de)位置。機器人(rén)在移動過程中可(kě)以通(tōng)過傳感器對(duì)地标進行觀測,這(zhè)些觀測的(de)集合表示爲 Zox=zoz,.·,3;而驅使機器人(rén)從 x 到x轉移的(de)控制量爲 ,在移動過程中所有控制量的(de)集合表示爲 U=uou,,u。SLAM 就是根據觀測Z和(hé)控制輸入 U,估計運動軌迹和(hé)地位置M的(de)過程。在SLAM 算(suàn)法框架中,對(duì)觀測Z的(de)提取部分(fēn)通(tōng)常被稱爲 SLAM 的(de)前端front-end);而利用(yòng)Zo和(hé)U對(duì)運動軌迹和(hé)地标位置進行估計的(de)部分(fēn)被稱爲SLAM的(de)後端(back-end)前端算(suàn)法一方面要從每一幀的(de)傳感器數據中提取出地标觀測信息,另一方面利用(yòng)數據關聯方法判斷新一幀數據中的(de)觀測地标是首次觀測到的(de)新地标還(hái)是某一已經被觀測到的(de)舊(jiù)地标。在激光(guāng)雷達 SLAM 中,通(tōng)常直接采用(yòng)三維點雲描述環境。建立幀間觀測的(de)關聯也(yě)是前端算(suàn)法的(de)重要組成部分(fēn),數據關聯算(suàn)法與地标描述方法緊密聯系。
激光(guāng) SLAM 系統在搭載激光(guāng)雷達的(de)同時(shí),還(hái)會搭載 IMU、相機等傳感器,形成多(duō)傳感器融合的(de)數據采集處理(lǐ)框架。
基于 SLAM 的(de)激光(guāng)點雲采集技術在數據采集的(de)過程中,不斷進行對(duì)點雲坐(zuò)标的(de)優化(huà),輸出即成圖,也(yě)體現了(le)實時(shí)這(zhè)個(gè)概念。若測區(qū)較大(dà),要求後續的(de)離線高(gāo)精度建圖,可(kě)以保存每一幀數據,采集完成後進行離線解算(suàn)。
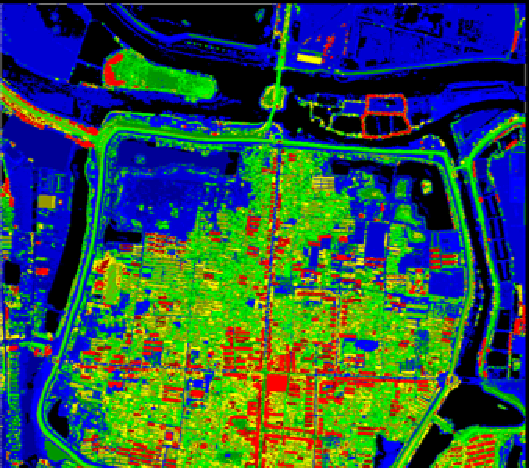
主流的(de)商用(yòng)背包式激光(guāng)掃描系統主要有:瑞士 Leica 公司的(de) Pegasus,英國GeoSLAM 公司的(de)ZEB Discovery,國内數字綠公司的(de) LiBackpack 系列,國内立得(de)空間公司的(de)背包俠,以及國内歐思徕公司的(de) 3D SLAM 激光(guāng)全景背負式機器人(rén)等。主流的(de)商用(yòng)手持式激光(guāng)掃描系統有瑞士 Leica 公司的(de) BLK 系列,美(měi)國KAARTA 公司的(de)STENCIL系列,英國GeoSLAM 公司的(de)ZEB Horizon,ZEB REVO等。主流的(de)商用(yòng)背包式激光(guāng)掃描系統,背包式激光(guāng)掃描系統在不同場(chǎng)景下(xià)獲取的(de)點雲數據。
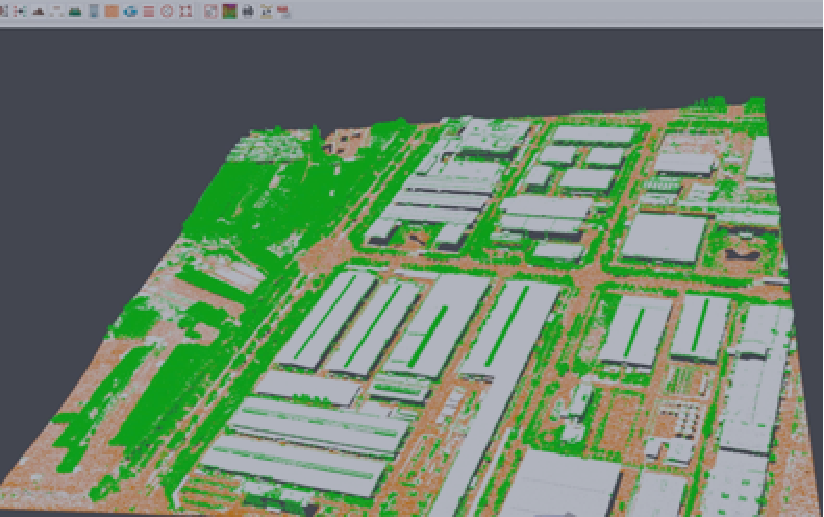
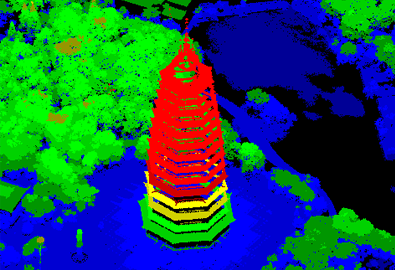
機載LiDAR可(kě)快(kuài)速獲取高(gāo)精度、高(gāo)密度的(de)地表三維坐(zuò)标信息數據。這(zhè)些數據是一系列空間分(fēn)布不均勻的(de)離散點雲數據,如何對(duì)這(zhè)些數據進行濾波是當前國内外研究的(de)熱(rè)點,現有濾波算(suàn)法大(dà)多(duō)都是基于...

近日,湖北(běi)省經信廳發布《2022年度湖北(běi)省創新産品應用(yòng)示範推薦目錄》(以下(xià)簡稱《目錄...
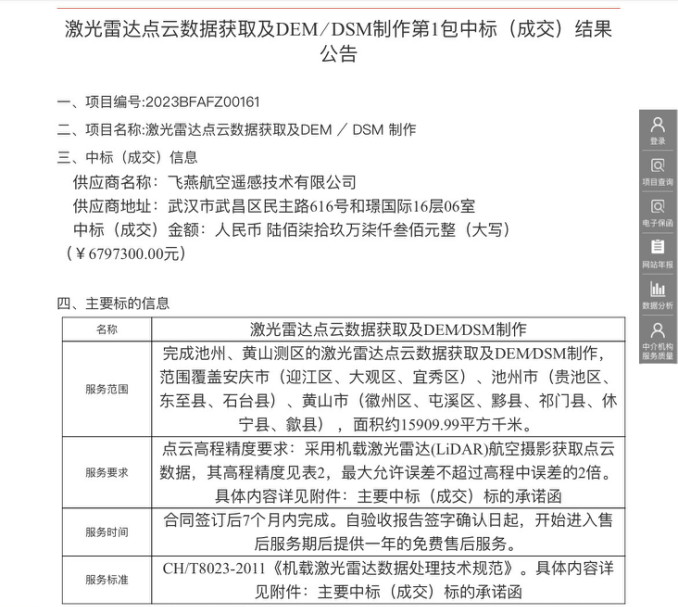
近日,飛(fēi)燕遙感喜中2023年安徽省機載激光(guāng)雷達點雲項目,中标金額6,797,300元。 此次...
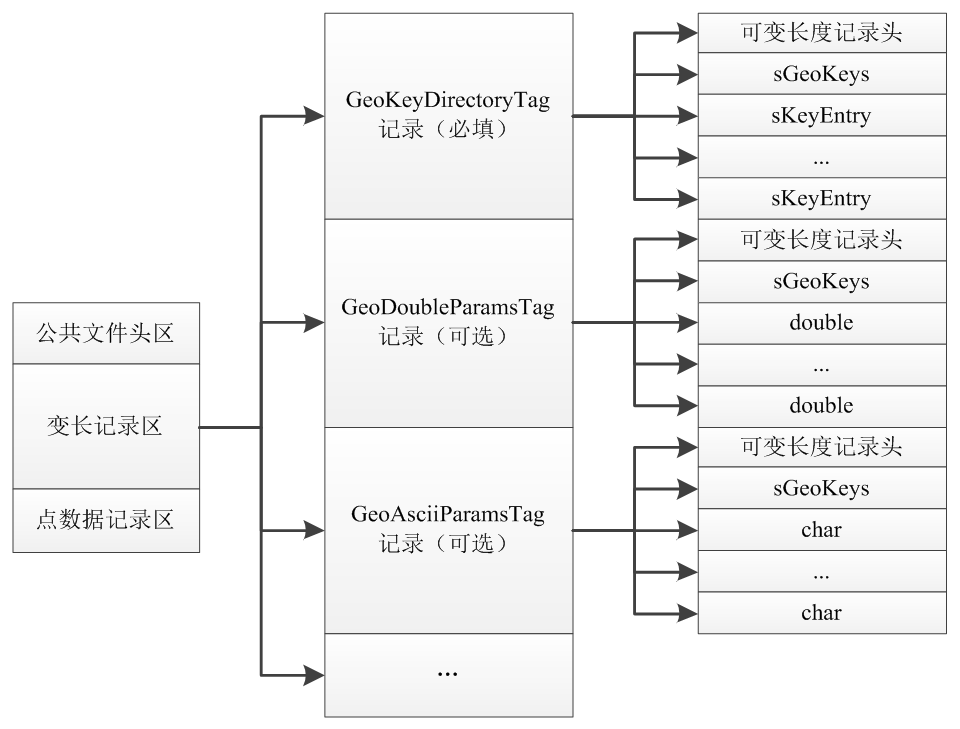
LAS 1.2是目前機載LiDAR中用(yòng)的(de)最多(duō)的(de)點雲文件格式之一。一個(gè)符合LAS 1.2 标準的(de)LIDAR ...
機載LiDAR技術是激光(guāng)測距技術、高(gāo)精度動态載體姿态測量技術和(hé)高(gāo)精度動态GPS差分(fēn)定位技...
目前地形數據獲取主要有三種方式:現場(chǎng)實測、三維正射影(yǐng)像轉數字高(gāo)程模型DEM、激光(guāng)三維...
電話(huà):025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南(nán)京市玄武區(qū)紅山街(jiē)道領智路56
号星河(hé)World産業園3号樓北(běi)8樓

微信公衆号

總經理(lǐ)微信
版權所有:廣東中科遙感技術有限公司 © 2019 備案号:  鄂公網安備:420106020021194号
鄂公網安備:420106020021194号  簡體中文/English
簡體中文/English