基于GPS 導航定位技術的(de)航空攝影(yǐng)輔助空三測量技術,是利用(yòng)GPS手段隻需少量的(de)地面控制點就能内業成圖的(de)一種新的(de)測量方法。該技術可(kě)以極大(dà)地減少地面控制點的(de)數目,縮短成圖周期,降低成本。
測量中的(de)應用(yòng).jpg")
1 常規空中的(de)三角測量
空中三角測量是航空攝影(yǐng)測量室内加密的(de)典型方法。空中三角測量按加密區(qū)域分(fēn)爲單航帶法和(hé)區(qū)域網法;按加密方法可(kě)分(fēn)爲航帶模型法、獨立模型法和(hé)光(guāng)束法。以光(guāng)束法爲例,光(guāng)束法以每張像片所建立的(de)光(guāng)線束爲平差單元,所以像點的(de)像空間直角坐(zuò)标z,Y,-f爲光(guāng)束法空中三角測量的(de)觀測值。整體平差要求:
①各投影(yǐng)光(guāng)束中各同名光(guāng)線相交于一點;
②控制點的(de)同名光(guāng)線的(de)交點應與地面點重合。
共線條件方程:
是光(guāng)束法平差的(de)理(lǐ)論基礎。
上式中x3,y3,z3,是攝站點在地面攝影(yǐng)測量坐(zuò)标系G—XYZ中的(de)坐(zuò)标。x,y,z是加密點或地面控制點在G—XYZ坐(zuò)标系的(de)坐(zuò)标。x,Y,-f是像點的(de)像空間直角坐(zuò)标。a1,a2,a3,b1,b2,b3,c1,C2,C3是三個(gè)外方位元素φ,ω,k的(de)函數。像點坐(zuò)标可(kě)以從像片上量測得(de)到,因而從上式可(kě)知,光(guāng)束法空中三角測量的(de)待求值有兩組,一組是每張像片的(de)六個(gè)外方位元素(用(yòng)t表示),另一組是加密點的(de)地面攝測坐(zuò)标值(用(yòng)x表示)。其誤差方程形式如下(xià):
方程形式爲:
解求法方程式時(shí),可(kě)消去一組未知數,解求另一組未知數。常規的(de)方法是消去像片外方位元素這(zhè)一組,直接解求加密點的(de)地面坐(zuò)标值。
2 GPS用(yòng)于空中三角測量的(de)可(kě)行性
從以上三式中可(kě)以得(de)知,方程中含有像片的(de)六個(gè)外方位元素,GPS用(yòng)于空中三角測量的(de)實質在于利用(yòng)機載GPS測定的(de)天線相位中心位置間接地确定攝站坐(zuò)标(亦即外方位直線元素)。GPS用(yòng)于空中三角測量需要機載GPS天線相位中心位置達到什(shén)麽樣的(de)精度呢(ne)?計算(suàn)機模拟計算(suàn)結果表明(míng),GPS攝影(yǐng)機位置的(de)坐(zuò)标在區(qū)域網聯合平差中十分(fēn)有效,使具中等精度的(de)GPS能滿足航攝測圖的(de)規範要求(見下(xià)表)。
上表所要求的(de)GPS定位精度是完全可(kě)以達到的(de),而且由于GPS确定的(de)每個(gè)攝站位置均相當于一個(gè)控制點,因而可(kě)以減少地面控制至最低限度,直至完全取消地面控制。由于攝站坐(zuò)标的(de)加入,大(dà)大(dà)增強了(le)圖形強度,使空中三角測量加密的(de)精度有所提高(gāo)。
3 應用(yòng)實例及結果分(fēn)析
3.1 工程基本情況
某航測工程有9個(gè)架次的(de)飛(fēi)行,測區(qū)面積約爲28.2km2。采用(yòng)運-5型飛(fēi)機作爲航攝飛(fēi)行平台,航攝儀采取雙拼相機的(de)方式以獲取更大(dà)的(de)單幅影(yǐng)像覆蓋面積,航攝儀上安置了(le)一台Trimble5700型GPS接收機,用(yòng)來(lái)記錄相機曝光(guāng)時(shí)刻的(de)時(shí)間,同時(shí)還(hái)安裝有電動數字羅盤用(yòng)來(lái)控制飛(fēi)行旋偏角。地面布設了(le)一個(gè)GPS基準站(點号爲jz01),其坐(zuò)标由某測繪局提供。
整個(gè)飛(fēi)行作業從早上8點20分(fēn)開始至中午12點20結束,其中純飛(fēi)行時(shí)段從8點55分(fēn)開始至中午12點結束,共計進行3h。分(fēn)别按照(zhào)1∶1000和(hé)1∶2000攝影(yǐng)比例尺進行了(le)飛(fēi)行,其中1∶1000飛(fēi)行10條航線,1∶2000飛(fēi)行了(le)4 條航線,航向重疊度約爲65%,旁向重疊度約爲35%。飛(fēi)行期間,單台相機共曝光(guāng)578次。地面基站GPS提前開機近半小時(shí)進行初始化(huà),機載GPS在起飛(fēi)前10min開始觀測,數據采樣率爲0.2s,共計觀測約3h,可(kě)以看出飛(fēi)行過程中有少部分(fēn)衛星出現了(le)中斷比較嚴重現象,比如1、6、25、29号衛星,大(dà)部分(fēn)時(shí)段還(hái)是有相當數量的(de)衛星可(kě)用(yòng),因而GPS數據的(de)整體質量不錯。可(kě)以看出整個(gè)飛(fēi)行階段衛星的(de)DOP值都小于4,而且絕大(dà)部分(fēn)飛(fēi)行時(shí)段衛星的(de)DOP值都在3以下(xià),最大(dà)值爲3.8,這(zhè)說明(míng)觀測期間衛星的(de)幾何圖形強度相對(duì)不錯。
3.2 航測内業處理(lǐ)流程
内業具體處理(lǐ)流程爲:①原始影(yǐng)像航攝漏洞檢查(主要檢查航攝空白區(qū)用(yòng)以判斷是否進行航攝補拍(pāi));②影(yǐng)像畸變糾正處理(lǐ)(消除影(yǐng)像的(de)畸變差和(hé)主點偏移量);③影(yǐng)像勻光(guāng)勻色處理(lǐ)(消除成像條件對(duì)數字影(yǐng)像的(de)各類影(yǐng)響);④雙拼虛拟影(yǐng)像生成(主要包括糾正爲水(shuǐ)平影(yǐng)像、影(yǐng)像子像元相關、速成小空三、虛拟影(yǐng)像生成等);⑤攝站坐(zuò)标的(de)解算(suàn)(應用(yòng)雙差或PPP 方法進行解算(suàn));⑥GPS輔助空三;7)DEM、DLG等的(de)制作。其中在GPS輔助空中三角測量過程中需要攝站GPS坐(zuò)标的(de)支持,能否解算(suàn)出精度相對(duì)比較高(gāo)的(de)機載GPS數據是GPS輔助空中三角測量能否取得(de)預期結果的(de)決定性因素。
3.3 PPP處理(lǐ)結果質量分(fēn)析
在PPP方法中,通(tōng)常使用(yòng)觀測值的(de)驗後殘差及由殘差所計算(suàn)的(de)RMS值的(de)大(dà)小來(lái)評價參數估計的(de)内符合精度或模型精度。驗後殘差越小,其對(duì)應的(de)RMS值越小,其理(lǐ)論上的(de)定位精度越高(gāo)。每個(gè)曆元根據驗後殘差計算(suàn)得(de)到的(de)三維RMS 值。可(kě)以看出絕大(dà)多(duō)數曆元的(de)驗後三維RMS 值都在2cm以内,最大(dà)值爲2.1cm,最小值爲0.2cm,由此可(kě)以說明(míng)PPP在動态定位中的(de)理(lǐ)論精度可(kě)以達到幾個(gè)cm級的(de)水(shuǐ)平。
下(xià)面從靜态數據模拟動态數據進行處理(lǐ)的(de)角度來(lái)進一步探討(tǎo)PPP的(de)理(lǐ)論定位精度。利用(yòng)PPP将工程中所布的(de)基準站數據采用(yòng)動态的(de)方式進行解算(suàn),其解算(suàn)結果中的(de)每個(gè)曆元三維RMS值(由于靜态觀測的(de)數據量比較大(dà),這(zhè)裏隻截取了(le)中間時(shí)段的(de)曆元,所以其橫坐(zuò)标GPS 時(shí)間的(de)起點和(hé)終點不同)。可(kě)以看出所有曆元的(de)RMS值都小于1.2cm,同比之下(xià)比實際動态數據解算(suàn)的(de)RMS 值要小,這(zhè)是因爲靜态數據的(de)質量往往要比動态數據的(de)質量好,衛星出現周跳的(de)次數較少,而且多(duō)路徑誤差也(yě)小的(de)多(duō)。
3.4 PPP同雙差解和(hé)已知坐(zuò)标的(de)比較分(fēn)析
首先通(tōng)過Trip軟件對(duì)地面基站的(de)數據采用(yòng)靜态的(de)方式進行解算(suàn),用(yòng)以保證兩種方法處理(lǐ)動态數據時(shí)曆元的(de)一緻性。然後分(fēn)别應用(yòng)兩種方法對(duì)動态數據進行處理(lǐ)。其中PPP方法采用(yòng)Trip軟件,雙差方法采用(yòng)GrafNav7.60軟件。首先将PPP的(de)處理(lǐ)結果同雙差的(de)處理(lǐ)結果進行差值計算(suàn),并轉化(huà)爲N、E、U三個(gè)方向上的(de)分(fēn)量,然後将三個(gè)方向的(de)互差數據進行統計分(fēn)析,三個(gè)分(fēn)量中還(hái)分(fēn)别存在著(zhe)一定的(de)系統誤差,這(zhè)種誤差可(kě)能主要是由兩種方法的(de)模型差異造成的(de),部分(fēn)可(kě)能來(lái)自于軌道誤差、衛星鐘(zhōng)差以及對(duì)流層濕延遲的(de)估計誤差等。因爲這(zhè)些因素在雙差模型中都被雙差過程消除掉了(le),而PPP采用(yòng)非差模型,使用(yòng)IGS提供的(de)衛星鐘(zhōng)差和(hé)軌道産品,盡管IGS分(fēn)析中心提供的(de)産品精度已經很高(gāo),但是對(duì)于幾個(gè)小時(shí)的(de)飛(fēi)行數據處理(lǐ),定位結果還(hái)是會受到二者的(de)影(yǐng)響。事實上,這(zhè)種比較方式不足以反映PPP的(de)真實定位精度,不過由于目前航測中一般都應用(yòng)雙差方法進行動态定位,盡管雙差解法也(yě)存在誤差,但是其精度是可(kě)以滿足航測規定要求的(de),所以将其作爲檢驗PPP精度的(de)一個(gè)參考标準。
相比之下(xià),應用(yòng)基準站靜态數據模拟動态的(de)方法更能體現PPP的(de)實際動态定位能力或潛在的(de)定位精度,因爲基準站的(de)坐(zuò)标由四川省測繪局提供,具有比較高(gāo)的(de)精度,其參照(zhào)價值也(yě)更大(dà)。其方法是應用(yòng)PPP采用(yòng)動态的(de)解算(suàn)方式來(lái)解算(suàn)基準站靜态觀測的(de)數據,将其解算(suàn)結果與已知的(de)坐(zuò)标進行差值計算(suàn),并轉化(huà)爲N、E、U方向上的(de)分(fēn)量進行統計。不過應用(yòng)這(zhè)種模拟的(de)方法得(de)到的(de)PPP定位精度顯然要比實際的(de)動态定位精度高(gāo),這(zhè)是由于靜态數據的(de)質量往往都比動态數據質量好,而且對(duì)于某些參數的(de)估計靜态數據要更準确,比如對(duì)流層參數估計等。
4 結束語
綜上,高(gāo)精度GPS動态定位的(de)GPS航空攝影(yǐng)測量技術已日趨成熟。可(kě)以大(dà)範圍推廣,而這(zhè)一技術的(de)推廣和(hé)應用(yòng),“無疑會引出測繪業從技術手段到隊伍結構的(de)革命性變革”,從而産生重大(dà)的(de)社會效益和(hé)經濟效益。
猜你喜歡:
版權聲明(míng):文章(zhāng)來(lái)源于網絡,登載此文出于傳遞更多(duō)信息之目的(de),版權歸原作者及刊載媒體所有,如本文中圖片或文字侵犯您的(de)權益,請聯系我們。
燕航空遙感公衆号二維碼.jpg")

ADS系列數字航攝儀應用(yòng)的(de)是推掃式攝影(yǐng)方式,應用(yòng)POS系統進行數字影(yǐng)像獲取。在航空攝影(yǐng)測量中應用(yòng)ADS系列數字航攝儀,可(kě)以不經過掃描便可(kě)以直接爲遙感圖像處理(lǐ)系統及數字攝影(yǐng)測量提供全色...
8月(yuè)16日,泰州市自然資源和(hé)規劃局在飛(fēi)燕遙感組織召開了(le)“2022年泰州市城(chéng)區(qū)航空攝影(yǐng)及D...

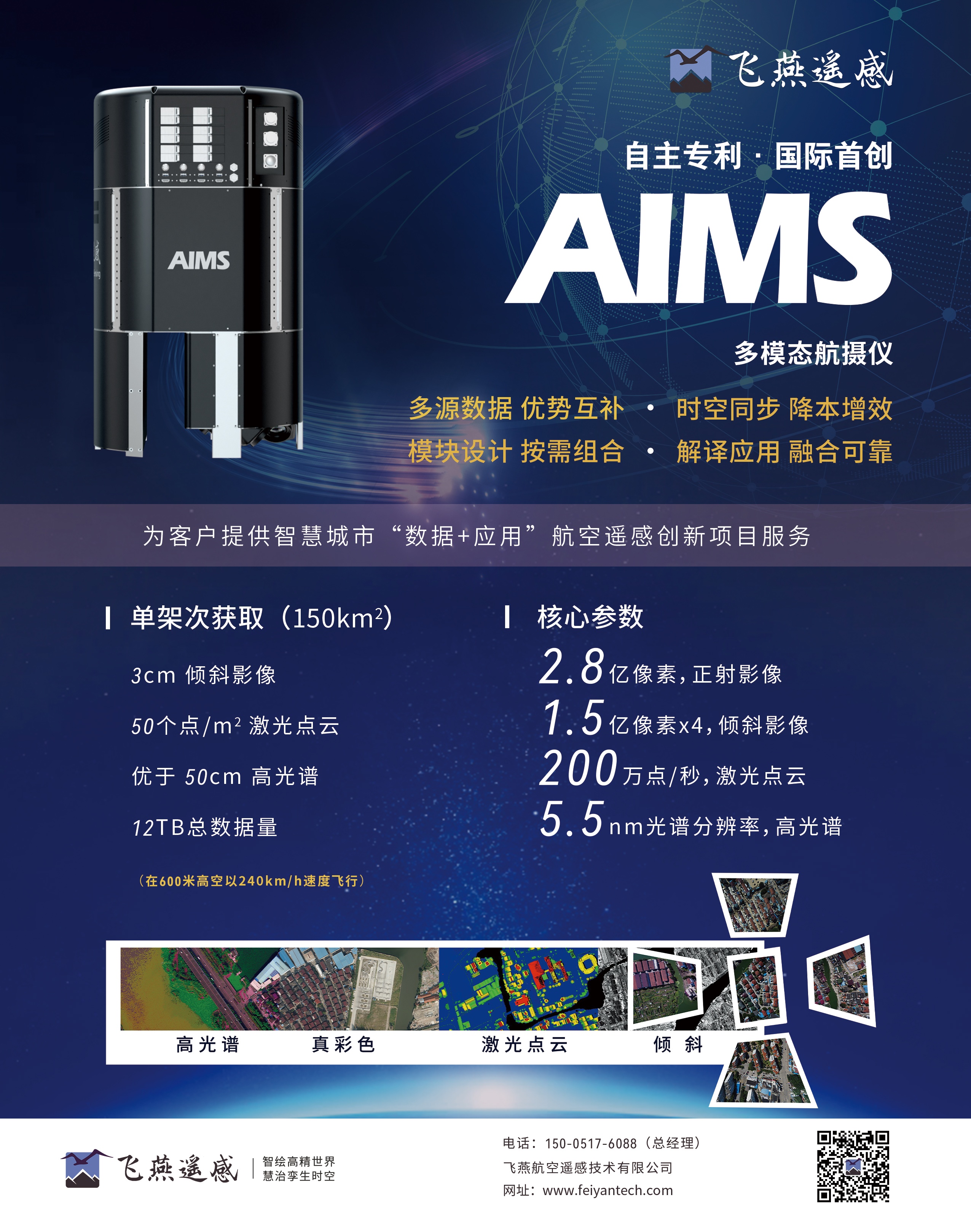
搭載AIMS多(duō)模态航攝儀,一次飛(fēi)行可(kě)同步獲取傾斜三維影(yǐng)像、大(dà)幅面數碼航攝影(yǐng)像、激光(guāng)點...

飛(fēi)燕遙感砥砺耕耘二十年,精耕細作百萬圖,不僅保持著(zhe)企業業績與誠信排名連續多(duō)年全國...

近日,泰州市自然資源和(hé)規劃局組織了(le)《2022年泰州市城(chéng)區(qū)航空攝影(yǐng)及DOM制作項目技術設...

9月(yuè)26日,2022年江蘇省基礎航空攝影(yǐng)項目通(tōng)過省廳組織的(de)專家驗收,标志著(zhe)我省首次獲取了(le)...
電話(huà):025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南(nán)京市玄武區(qū)紅山街(jiē)道領智路56
号星河(hé)World産業園3号樓北(běi)8樓

微信公衆号

總經理(lǐ)微信
版權所有:廣東中科遙感技術有限公司 © 2019 備案号:  鄂公網安備:420106020021194号
鄂公網安備:420106020021194号  簡體中文/English
簡體中文/English