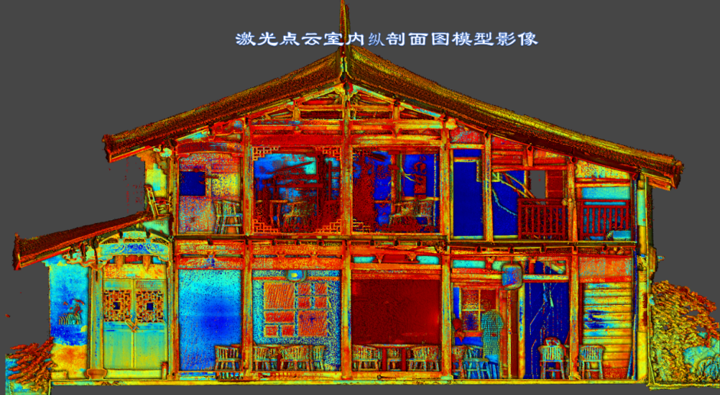
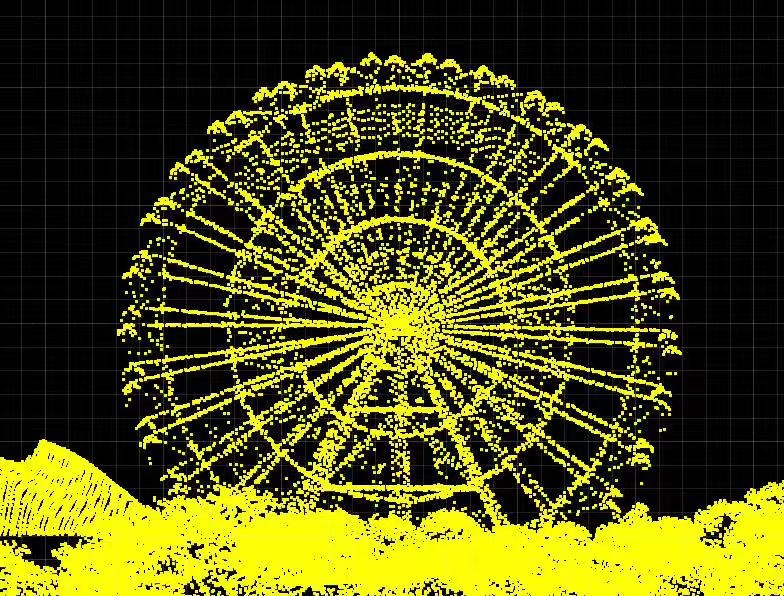
機載激光(guāng)雷達系統(Light Detection And Ranging,簡稱LIDAR),也(yě)叫機載激光(guāng)雷達,是一種安裝在飛(fēi)機上的(de)機載激光(guāng)探測和(hé)測距系統,它集成了(le)激光(guāng)掃描儀、差分(fēn)GPS系統、IMU(Inertial Measurement Unit,慣性量測單元,用(yòng)以量測飛(fēi)機平台的(de)飛(fēi)行姿态)、數碼相機。在動态載波相位差分(fēn)GPS系統和(hé)IMU的(de)支持下(xià),激光(guāng)掃描系統通(tōng)過激光(guāng)掃描器和(hé)距離傳感器,經由微計算(suàn)機對(duì)測量資料進行内部處理(lǐ),顯示或存儲、輸出距離和(hé)角度等資料,并與距離傳感器獲取的(de)數據相匹配,經過相應軟件進行一系列處理(lǐ)來(lái)獲取被測目标的(de)表面形态和(hé)三維坐(zuò)标數據,從而進行各種量算(suàn)或建立立體模型。
在過去十年,機載LIDAR作爲精确、快(kuài)速的(de)獲取地面三維數據的(de)工具已經得(de)到廣泛的(de)認同。至2004年全球已經有超過30類不同型号的(de)激光(guāng)掃描系統投放市場(chǎng)。加拿大(dà)Optech公司生産的(de)ALTM和(hé)SHOALS、美(měi)國Leica公司的(de)ALS50、瑞典的(de)TopoEye AB公司生産的(de)TopEye、德國IGI公司的(de)LiteMapper、法國Toposys公司的(de)FalconⅡ等是當前較成熟的(de)商業系統。
1 LIDAR數據獲取 的(de)基本原理(lǐ)
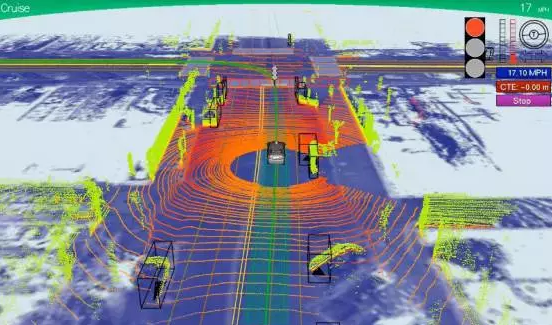
當機載LIDAR航攝飛(fēi)行時(shí),激光(guāng)掃描儀發射、接收激光(guāng)束,對(duì)地面進行線狀掃描,與此同時(shí),動态GPS系統确定傳感器的(de)空間位置(經緯度),IMU測量飛(fēi)機的(de)實時(shí)姿态數據,即滾動、仰俯和(hé)航偏角。由于系統的(de)幾個(gè)部分(fēn)同步工作并集成于一體,GPS 和(hé)IMU的(de)數據融合極爲方便,所以經後期地面數據處理(lǐ)後,即可(kě)獲取地面的(de)三維數據。
2 LIDAR數據的(de)獲取和(hé)處理(lǐ)
2.1 LIDAR設備選擇
在某市1∶500比例尺地形測量項目中,高(gāo)程精度的(de)要求優于0.15 m,我們選擇了(le)加拿大(dà)Optech公司的(de)ALTM3100。基于30年的(de)LIDAR生産經驗,新一代的(de)ALTM-3100采樣頻(pín)率高(gāo)達100 kHz,1200 m航高(gāo)以下(xià)高(gāo)程精度達到0.15 m,平面精度可(kě)以達到航高(gāo)的(de)1/3000,能夠滿足設計需求。
2.2 航攝高(gāo)度和(hé)飛(fēi)行時(shí)間的(de)選擇
LIDAR數據的(de)精度與航攝高(gāo)度有關,本攝區(qū)航攝的(de)目的(de)是爲1∶500基礎測繪數字産品提供高(gāo)程數據,爲确保測繪成果的(de)質量,根據現行相關技術标準的(de)規定和(hé)ALTM-3100的(de)性能規格,以及飛(fēi)機性能和(hé)攝區(qū)對(duì)航高(gāo)的(de)約束條件,設計飛(fēi)行高(gāo)度爲800 m。
LIDAR系統是一個(gè)先進的(de)主動傳感系統,它不依賴太陽光(guāng)照(zhào),所以在獲取地面三維信息時(shí)可(kě)以考慮夜航。飛(fēi)行作業中,需根據測區(qū)内實際星曆數據情況,選擇避開GPS信号較弱時(shí)段。爲了(le)避免植被,尤其是農作物(wù)對(duì)真實地面的(de)幹擾,建議(yì)選擇秋冬季節進行航飛(fēi)。所以測區(qū)的(de)航攝時(shí)間選擇在當年10月(yuè)至次年1月(yuè)間,并且增加了(le)夜航。
2.3 LIDAR數據的(de)獲取
該1∶500地形測量項目共涉及飛(fēi)行11個(gè)架次,其中1個(gè)架次爲檢校場(chǎng)飛(fēi)行,用(yòng)于ALTM-3100系統檢校,其他(tā)10個(gè)架次爲測區(qū)航攝飛(fēi)行。全測區(qū)面積810 km2,航線總計81條,總長(cháng)2613.5 km2,飛(fēi)行高(gāo)度800 m,有效飛(fēi)行時(shí)間爲29小時(shí)30分(fēn)。激光(guāng)掃描儀脈沖頻(pín)率100 kHz,掃描頻(pín)率43 Hz,掃描角度21°,旁向重疊率30%,激光(guāng)點地面點間距0.52 m。
2.4 LIDAR數據的(de)處理(lǐ)
LIDAR航攝飛(fēi)行結束後,要盡快(kuài)對(duì)航飛(fēi)數據進行有效性評價,決定是否需要補飛(fēi)或重飛(fēi),進而解算(suàn)激光(guāng)點數據,并進行分(fēn)類處理(lǐ)。
2.4.1 LIDAR數據處理(lǐ)流程
原始數據解碼:原始采集的(de)激光(guāng)數據與POS數據(定位定向數據,包括DGPS數據和(hé)IMU數據)需要進行解碼,從而獲得(de)GPS文件,IMU文件,激光(guāng)點文件等;POS數據處理(lǐ):機載POS與地面基站GPS進行差分(fēn)和(hé)融合,獲得(de)精确坐(zuò)标;激光(guāng)數據處理(lǐ):處理(lǐ)後的(de)POS數據與激光(guāng)點數據融合,獲得(de)地面坐(zuò)标;輸出激光(guāng)點文件。
2.4.2 LIDAR數據處理(lǐ)說明(míng)
解算(suàn)原則,方法:實際解算(suàn),采用(yòng)多(duō)邊形範圍輸出,以單條航線存儲爲一個(gè)激光(guāng)點文件;坐(zuò)标系統,采用(yòng)WGS84橢球,UTM投影(yǐng)坐(zuò)标系;POS處理(lǐ)說明(míng):處理(lǐ)基站時(shí),使用(yòng)某市所在省份的(de)GPS控制網,并同時(shí)保證機場(chǎng)附近架設一個(gè)基站,由觀測手簿獲得(de)基站坐(zuò)标及天線高(gāo);使用(yòng)基站時(shí),盡可(kě)能多(duō)的(de)使用(yòng)離測區(qū)範圍最近的(de)所有基站。航帶重疊處理(lǐ):航線與航線之間重疊的(de)部分(fēn),根據航線,将重疊部分(fēn)的(de)數據劃分(fēn)出去,減小數據量。
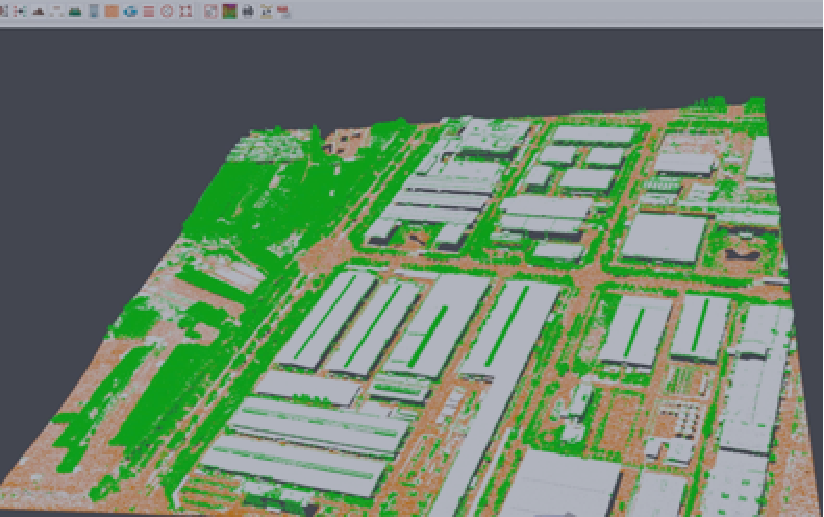
2.4.3 LIDAR數據分(fēn)類處理(lǐ)
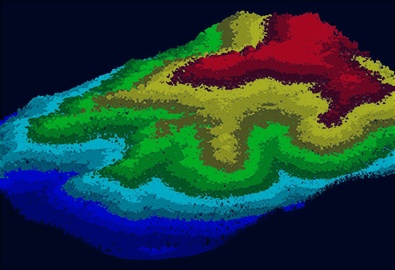
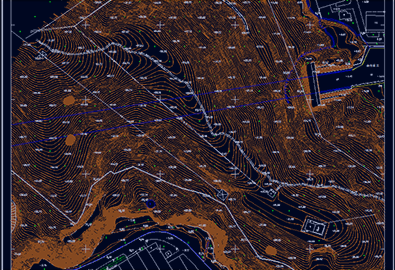
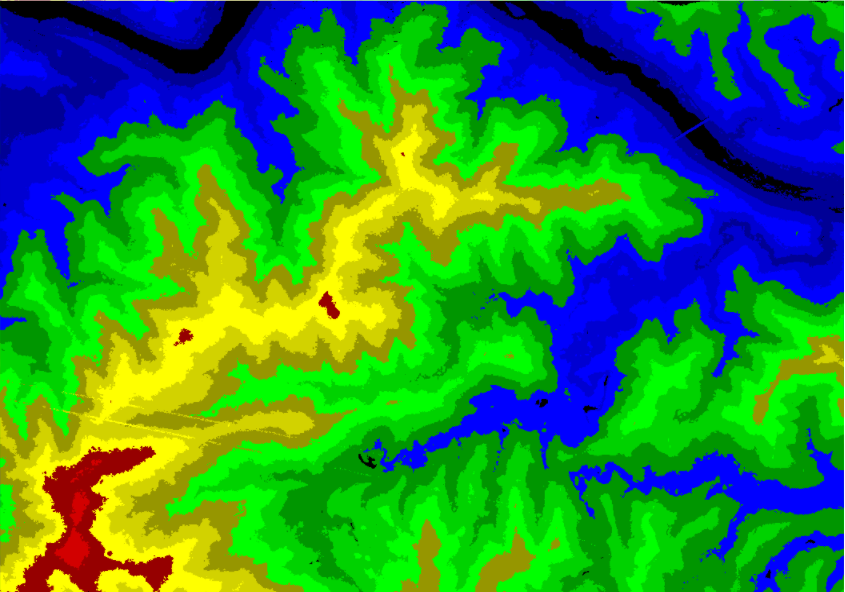
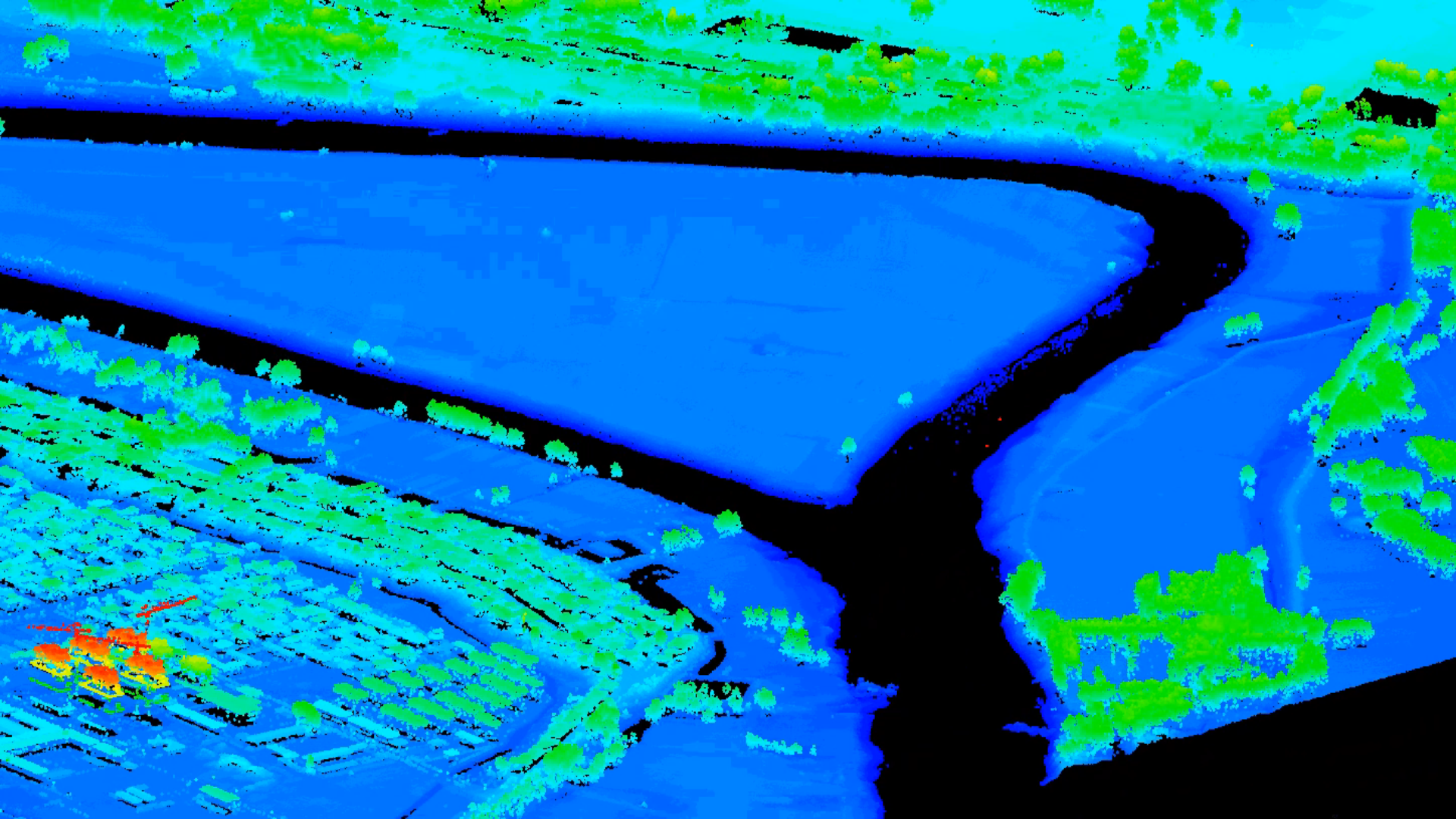
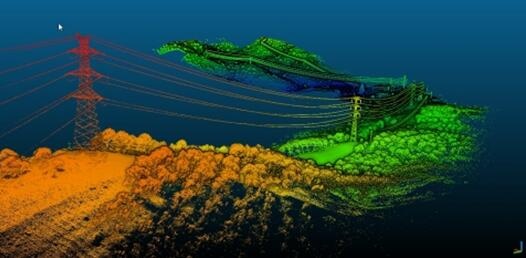
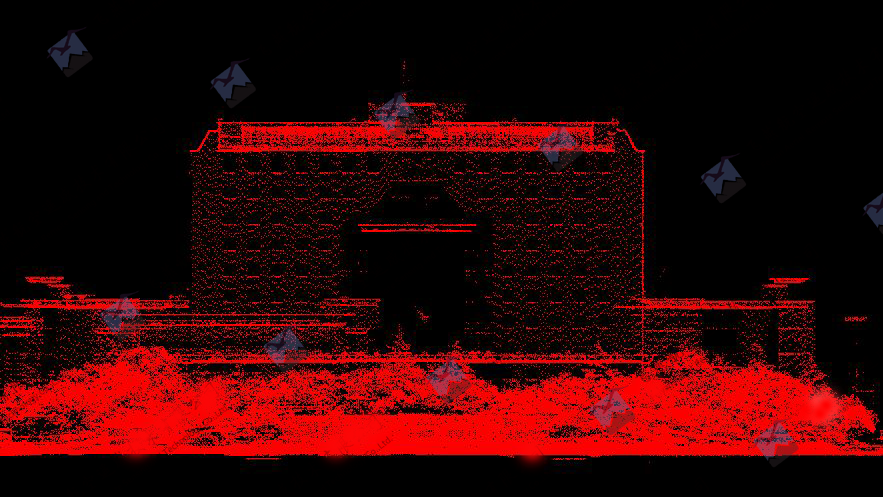
LIDAR數據包括很多(duō)類型,例如房(fáng)屋建築、植被、水(shuǐ)體、地表、管線等,如果要提取DTM(Digital Terrain Model,數字地形模型),就必須将非地表類型點和(hé)地表點分(fēn)離開,也(yě)就是要進行數據分(fēn)類。目前基于LIDAR數據點濾波的(de)方法絕大(dà)部分(fēn)都是基于三維激光(guāng)數據腳點的(de)高(gāo)程突變等信息進行的(de),概括來(lái)講主要有移動窗(chuāng)口法,叠代線性最小二乘内插法,基于地形坡度濾波和(hé)移動曲面拟合法等幾種。
猜你喜歡:
版權聲明(míng):文章(zhāng)來(lái)源于網絡,登載此文出于傳遞更多(duō)信息之目的(de),版權歸原作者及刊載媒體所有,如本文中圖片或文字侵犯您的(de)權益,請聯系我們。
燕航空遙感公衆号二維碼.jpg")
作爲一種三維信息的(de)實時(shí)獲取手段,LIDAR 的(de)應用(yòng)熱(rè)潮在國外已經掀起,在未來(lái)兩三年内中國應用(yòng) LIDAR 技術的(de)市場(chǎng)将更加廣泛。但是 LIDAR 數據的(de)後處理(lǐ)的(de)工作還(hái)相對(duì)滞後,爲特定應用(yòng)選擇适合...
機載激光(guāng)雷達系統(Light Detection And Ranging,簡稱LIDAR),也(yě)叫機載激光(guāng)雷達,是一種...

城(chéng)市是GIS的(de)運用(yòng)與研究領域的(de)一個(gè)重要方面。已被廣泛應用(yòng)于城(chéng)市規劃、建築設計等領域的(de)...
爲了(le)創建地面模型和(hé)建築物(wù)模型而進行的(de)LIDAR數據的(de)預處理(lǐ)包含了(le)粗差剔除,數據的(de)分(fēn)類和(hé)...
2019年,飛(fēi)燕遙感承接安徽平原、丘陵、山區(qū)共9個(gè)縣的(de)森林(lín)資源調查工作,完成機載激光(guāng)雷...
該項目是江蘇省内首次多(duō)傳感器協同作業,高(gāo)密度點雲和(hé)高(gāo)分(fēn)辨率影(yǐng)像同時(shí)獲取,影(yǐng)像分(fēn)辨...
電話(huà):025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南(nán)京市玄武區(qū)紅山街(jiē)道領智路56
号星河(hé)World産業園3号樓北(běi)8樓

微信公衆号

總經理(lǐ)微信
版權所有:廣東中科遙感技術有限公司 © 2019 備案号:  鄂公網安備:420106020021194号
鄂公網安備:420106020021194号  簡體中文/English
簡體中文/English