三維建模的(de)技術主要分(fēn)爲人(rén)工建模、傾斜攝影(yǐng)建模和(hé)激光(guāng)雷達建模3種。人(rén)工建模模型效果好,缺點是周期長(cháng)、非實景建模,一般适用(yòng)于小範圍、單個(gè)對(duì)象建模;傾斜攝影(yǐng)建模效率高(gāo)、成本低、實景模型,缺點是受外部因素影(yǐng)響大(dà)、細節效果不夠好,一般适用(yòng)于大(dà)範圍建模;地面激光(guāng)雷達抗幹擾強、效果好,但成本較高(gāo)、範圍小,一般适用(yòng)于古建築、單個(gè)對(duì)象。
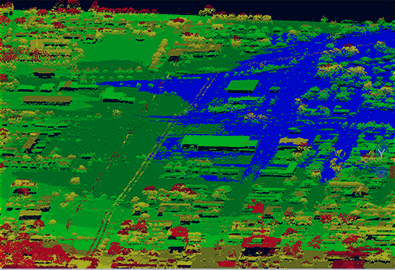
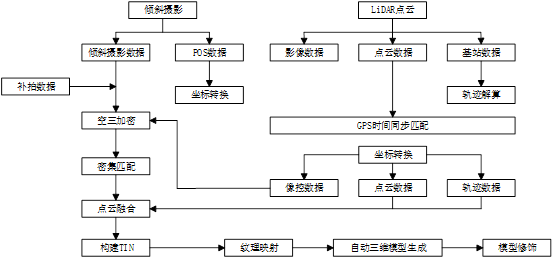
傳統的(de)傾斜攝影(yǐng)在數據采集過程中,存在物(wù)體遮擋、航攝盲區(qū)等客觀因素限制,造成三維模型扭曲、空洞、紋理(lǐ)拉花等問題。基于無人(rén)機傾斜攝影(yǐng)、機載激光(guāng)雷達、地面激光(guāng)雷達融合建模的(de)方法,同時(shí)采用(yòng)大(dà)疆無人(rén)機補拍(pāi)重點建築紋理(lǐ)數據對(duì)傾斜攝影(yǐng)數據進行補充,将4種數據相融合進行實景三維重建,可(kě)以獲得(de)高(gāo)效率、低成本、精細化(huà)的(de)實景三維模型。
五鏡頭傳感器相機采集5個(gè)角度的(de)航攝影(yǐng)像。
利用(yòng)無人(rén)機補拍(pāi)重點建築紋理(lǐ)數據。
圖像數據預處理(lǐ):對(duì)采集影(yǐng)像進行檢查和(hé)預處理(lǐ),主要包括航片質量檢查、航片勻色等。
空中三角測量:可(kě)使用(yòng)重建大(dà)師軟件結合POS系統提供的(de)外方位元素和(hé)相機安裝位置關系,模拟包括傾斜影(yǐng)像在内的(de)所有影(yǐng)像的(de)地表投影(yǐng)範圍,采取由粗到精的(de)金字塔匹配策略,在各級影(yǐng)像上進行同名點自動匹配和(hé)自由網光(guāng)束法平差,得(de)到較好的(de)同名點匹配結果。
根據設備性能、點雲密度、重疊度和(hé)飛(fēi)行範圍制定飛(fēi)行方案,包括飛(fēi)行的(de)時(shí)間、地點、基站架設等。
對(duì)原始數據進行解碼,将基站觀測數據、基站坐(zuò)标和(hé)機載GNSS觀測數據、IMU數據導入軟件進行POS數據處理(lǐ)。
采用(yòng)控制點檢查的(de)方式檢查點雲數據精度。
地面掃描時(shí),需對(duì)掃描場(chǎng)景進行掃描區(qū)塊劃分(fēn),拆分(fēn)爲多(duō)個(gè)合理(lǐ)的(de)區(qū)塊,各區(qū)塊之間要有重疊,且對(duì)各區(qū)塊提前進行掃描線路規劃,盡可(kě)能圍繞地物(wù)繞8字形閉合線路。
點雲去噪:由于掃描環境、掃描目标、設備參數等原因,掃描過程中會産生部分(fēn)噪聲數據,這(zhè)些噪聲會影(yǐng)響點雲配準的(de)精度。通(tōng)過不同的(de)濾波方法,如高(gāo)斯濾波、随機采樣一緻性濾波,完成點雲數據的(de)濾波與平滑。
點雲拼接:常用(yòng)的(de)拼接方法爲自動拼接和(hé)手動拼接。自動拼接可(kě)通(tōng)過提取重疊部分(fēn)點雲的(de)特征點或人(rén)爲設置公共靶标進行配準;人(rén)工配準則需要人(rén)工選取不同的(de)特征點,利用(yòng)多(duō)組特征點計算(suàn)得(de)出旋轉矩陣完成拼接。
點雲坐(zuò)标系轉換:拼接完成後的(de)點雲數據通(tōng)過控制點進行坐(zuò)标轉換到CGCS2000中。
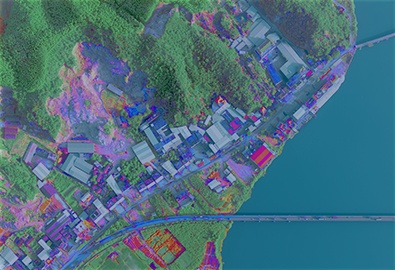
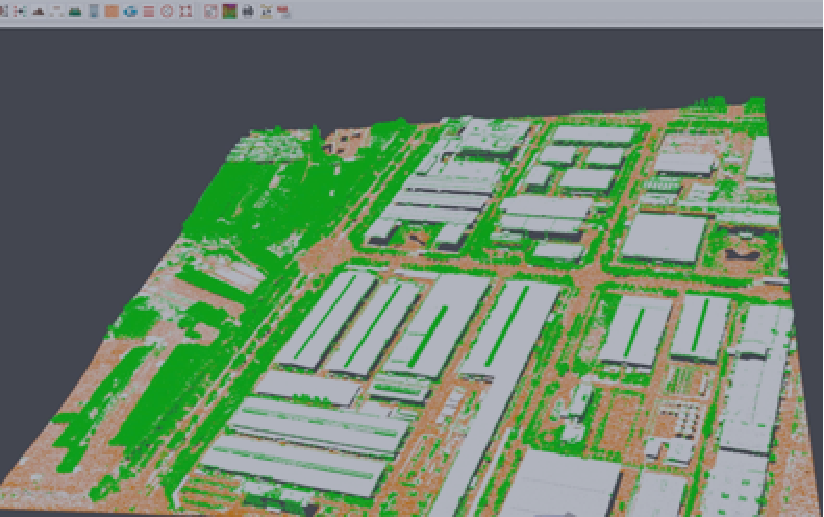
首先利用(yòng)重建大(dà)師進行多(duō)源數據融合三維模型生産,将合格的(de)傾斜攝影(yǐng)空三加密成果自動生成的(de)密集點雲和(hé)機載、地而采集的(de)點雲通(tōng)過賦予不同的(de)權重進行點雲融合、配準,共同構建不規則三角網TIN;然後對(duì)三角網進行平滑和(hé)簡化(huà)後生成白模;最後将傾斜影(yǐng)像的(de)紋理(lǐ)自動映射到白模上,生成高(gāo)精度的(de)三維模型。
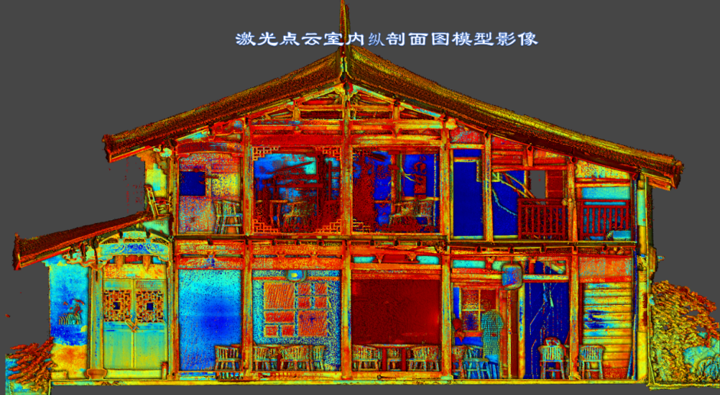
傳統傾斜攝影(yǐng)建模由于建築物(wù)遮擋,采集不到房(fáng)檐下(xià)數據、紋理(lǐ)覆蓋不夠或白模質量差。融合地面激光(guāng)雷達掃描數據後,房(fáng)檐下(xià)紋理(lǐ)清晰可(kě)辨,白模精度大(dà)幅提高(gāo),模型棱角分(fēn)明(míng)。傳統傾斜攝影(yǐng)建模與多(duō)源數據融合建模效果對(duì)比如下(xià):

從模型效果上來(lái)看,傳統傾斜攝影(yǐng)測量生成的(de)模型有部分(fēn)結構缺失,如城(chéng)門的(de)門洞、店(diàn)鋪的(de)窗(chuāng)格等。在建築物(wù)的(de)房(fáng)檐下(xià),由于遮擋,影(yǐng)像的(de)重疊度不足,使得(de)采用(yòng)傳統傾斜攝影(yǐng)房(fáng)檐下(xià)模型結構生成不完整,紋理(lǐ)扭曲、拉花嚴重。采用(yòng)多(duō)源數據融合技術可(kě)使模型的(de)效果大(dà)大(dà)提升,如房(fáng)檐下(xià)模型結構完整,地下(xià)部分(fēn)結構清晰可(kě)見,紋理(lǐ)清晰。
實景三維作爲專用(yòng)名詞術語,其定義爲 “實景三維是對(duì)一定範圍内人(rén)類生産、生活和(hé)生态空間進行真實、立體、時(shí)序化(huà)反映和(hé)表達的(de)數字空間,是新型基礎測繪的(de)标準化(huà)産品,是國家重要的(de)新型...

景三維作爲真實、立體、時(shí)序化(huà)反映人(rén)類生産、生活和(hé)生态空間的(de)時(shí)空信息,是國家重要的(de)...

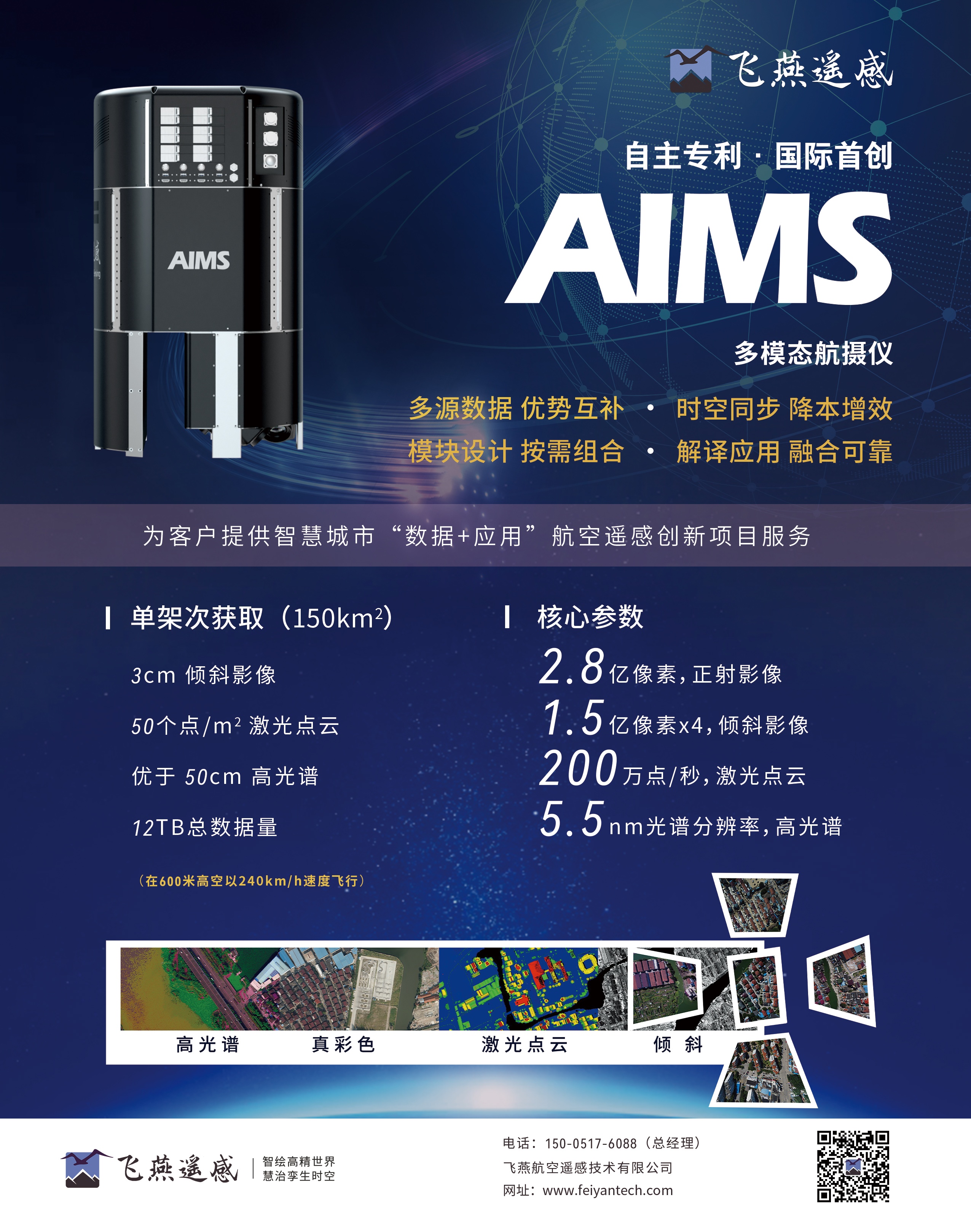
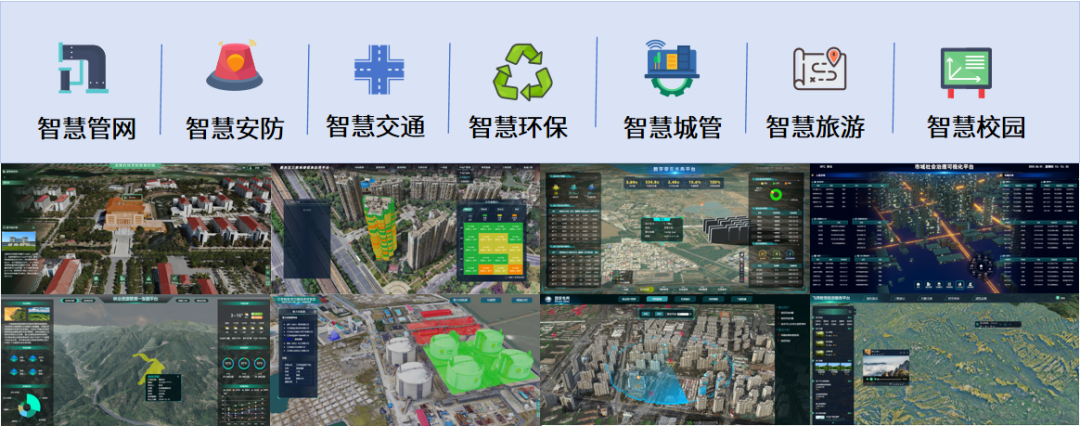
飛(fēi)燕遙感打造了(le)“AIMS多(duō)模态航空遙感一站式解決方案”。近三年,已在上海、廣州、香港...
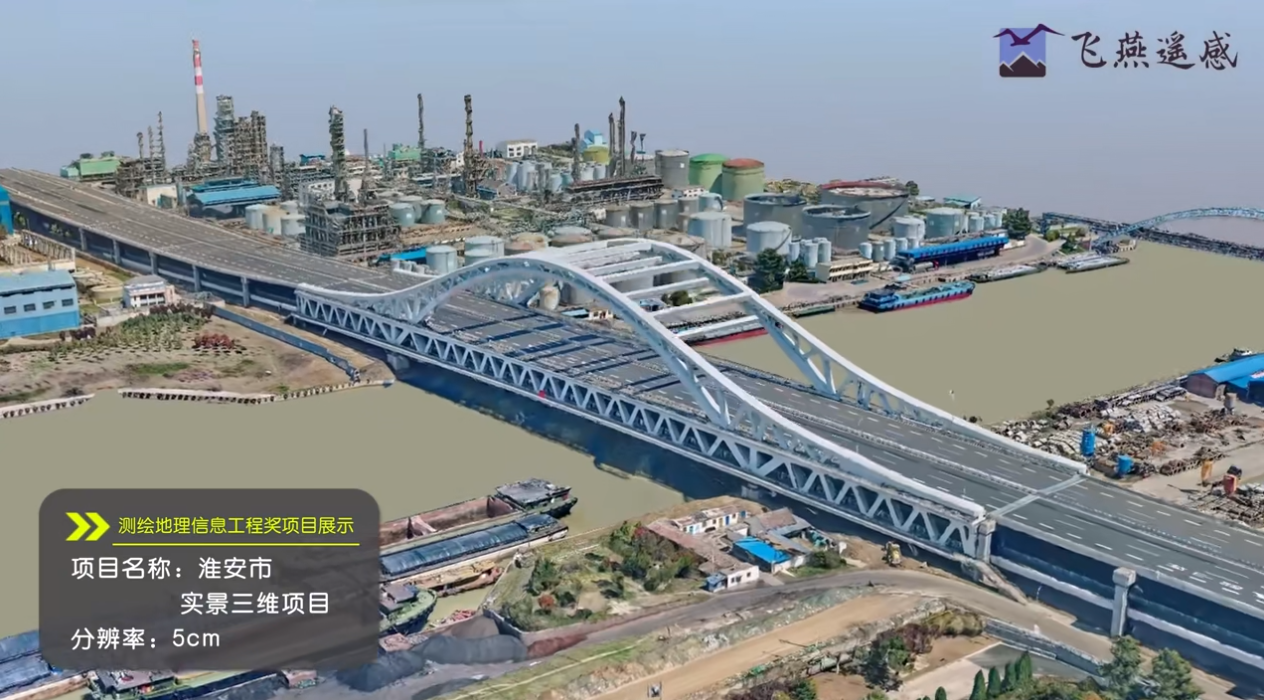
近日,淮安市自然資源和(hé)規劃局在南(nán)京組織召開了(le)“2023年度實景三維淮安建設”項目驗收...
項目成果爲江蘇智慧城(chéng)市建設、空間規劃等領域提供了(le)堅實的(de)數據支撐與決策依據,在項目...

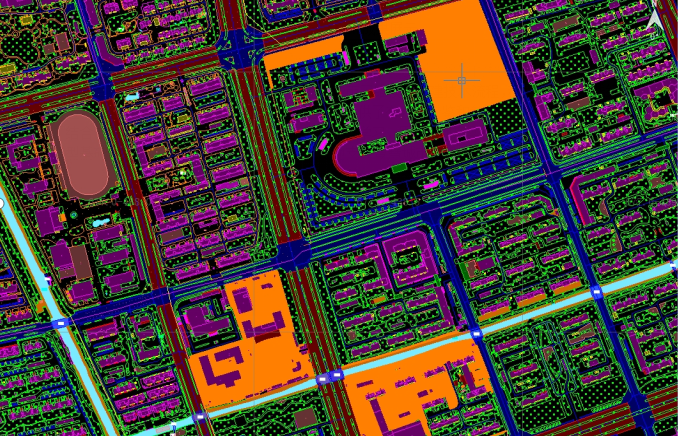
武漢新型基礎測繪項目采用(yòng)了(le)飛(fēi)燕遙感的(de)AIMS多(duō)源航空遙感解決方案,此方案優勢在于一次...
電話(huà):025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南(nán)京市玄武區(qū)紅山街(jiē)道領智路56
号星河(hé)World産業園3号樓北(běi)8樓

微信公衆号

總經理(lǐ)微信
版權所有:廣東中科遙感技術有限公司 © 2019 備案号:  鄂公網安備:420106020021194号
鄂公網安備:420106020021194号  簡體中文/English
簡體中文/English