實景三維數據采集裝備按采集目的(de)、對(duì)象和(hé)技術特點可(kě)分(fēn)爲衛星遙感平台、航空遙感平台與地面平台,聯合組成了(le)多(duō)層次、立體化(huà)的(de)實景三維數據采集體系,獲取空天地多(duō)源、多(duō)模态數據,滿足地形級、城(chéng)市級與部件級實景三維建設的(de)需要。
衛星遙感平台主要用(yòng)于大(dà)範圍數據采集,能夠獲取地形地貌等數據,具有範圍廣更新快(kuài)、可(kě)重複觀測等數據采集優勢。近年來(lái),随著(zhe)衛星遙感數據的(de)時(shí)間、空間和(hé)光(guāng)譜分(fēn)辨率逐步提升,衛星遙感平台在地形級實景三維場(chǎng)景制作中發揮越來(lái)越重要的(de)作用(yòng)。
航空遙感平台主要包括大(dà)型有人(rén)機和(hé)小型無人(rén)機平台,并根據數據需求的(de)不同搭載多(duō)類型的(de)采集設備。其中,大(dà)型有人(rén)機主要用(yòng)于大(dà)範圍區(qū)域數據采集,小型無人(rén)機主要用(yòng)于小區(qū)域和(hé)飛(fēi)行困難區(qū)域數據采集,或作爲有人(rén)機數據采集的(de)補充,兩者各有優劣。地面平台主要通(tōng)過車載、背包、手持等方式,集激光(guāng)雷達、光(guāng)學相機、定姿定位系統等于一體,利用(yòng)移動測量技術,獲取建築、交通(tōng)、地下(xià)管線等對(duì)象的(de)高(gāo)精度實景三維數據。

衛星遙感平台是指在一定高(gāo)度的(de)對(duì)地觀測人(rén)造地球衛星上安裝各種遙感儀器,即據采集裝備,主要有全色、多(duō)光(guāng)譜、高(gāo)光(guāng)譜相機、合成孔徑雷達(synthetic aperture radar,SAR),以及一些具備立體測繪能力的(de)相機等。
不同衛星根據設計及用(yòng)途搭載不同的(de)傳感器,主要包括光(guāng)學遙感衛星、SAR 衛星以及一些具有立體測繪模式的(de)衛星等,這(zhè)些衛星的(de)傳感器參數見表 2-1。

表 2-1 光(guāng)學、SAR、立體測繪衛星的(de)傳感器參數
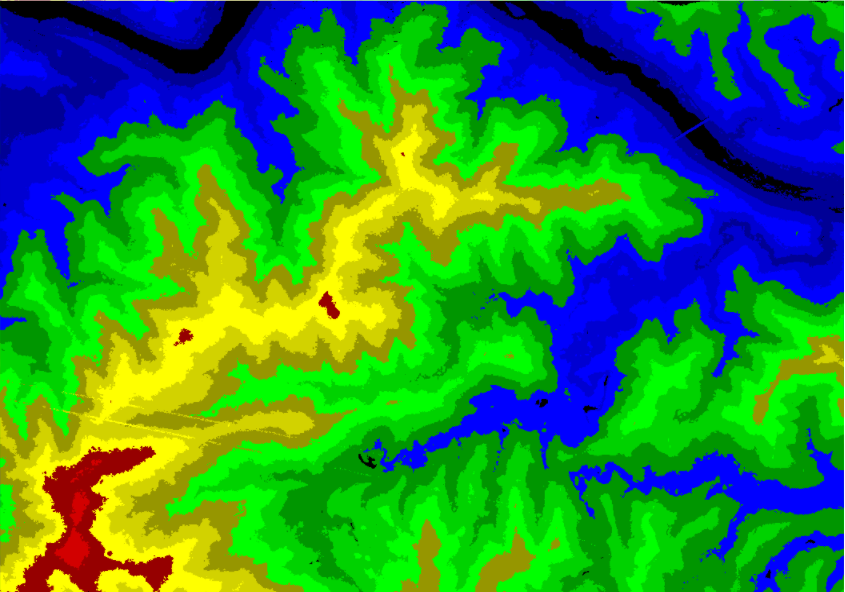
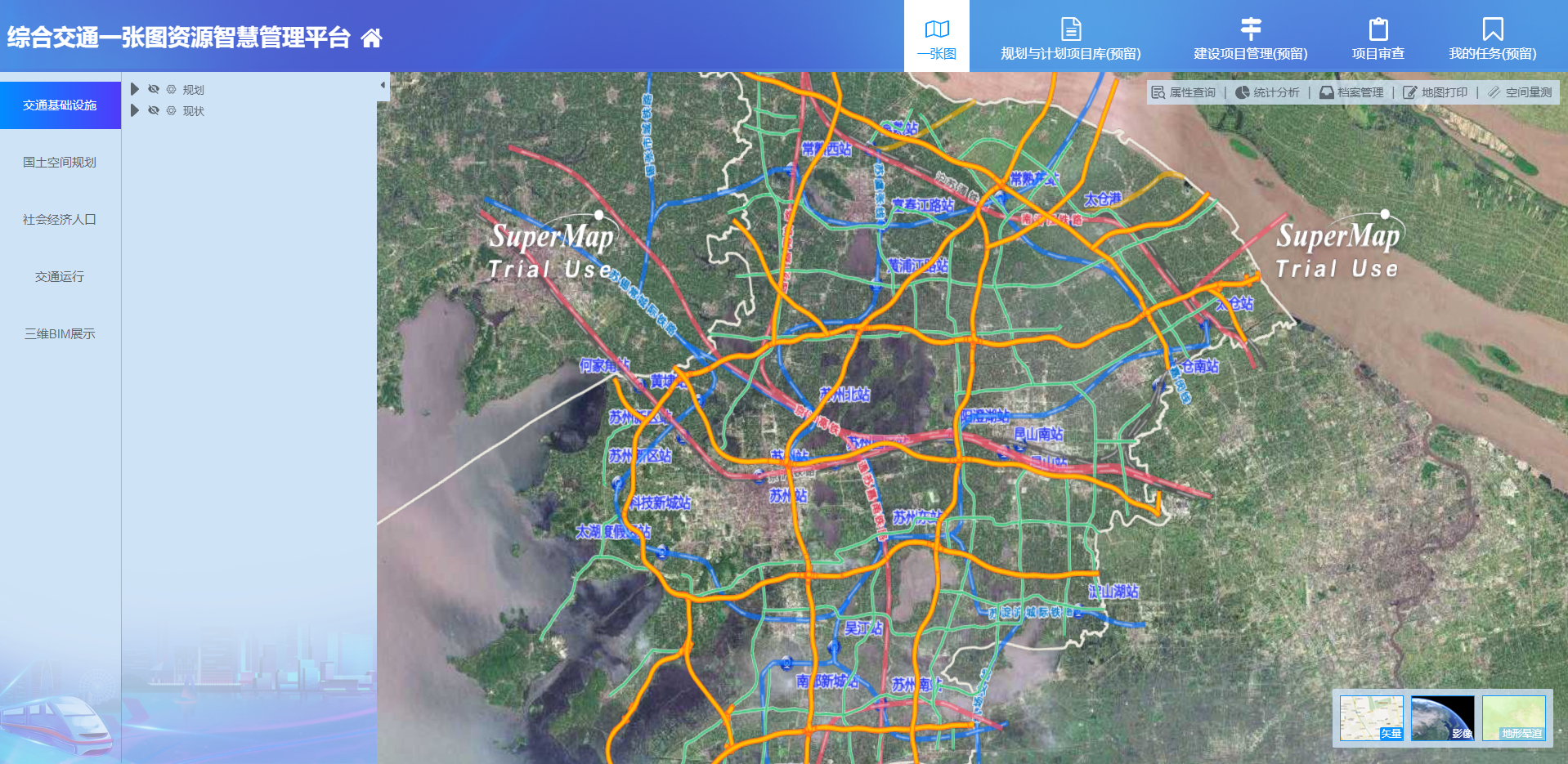
光(guāng)學遙感衛星主要有高(gāo)分(fēn)系列、GeoEye-1、WorldView-3 等衛星。在實景三維數據采集中,光(guāng)學遙感衛星影(yǐng)像利用(yòng)已有 DEM 數據,消除地形投影(yǐng)誤差後制作成 DOM産品,聯合構建成大(dà)範圍的(de)地形級實景三維場(chǎng)景,搭建實景三維時(shí)空底座。同時(shí),随著(zhe)光(guāng)學遙感衛星影(yǐng)像空間分(fēn)辨率的(de)不斷提高(gāo),在城(chéng)市級實景三維模型重建中也(yě)将發揮重要作用(yòng)。
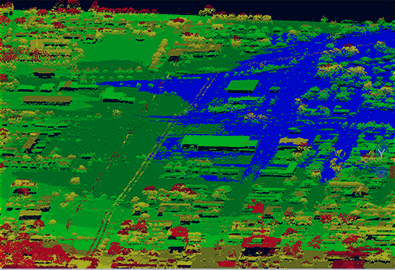
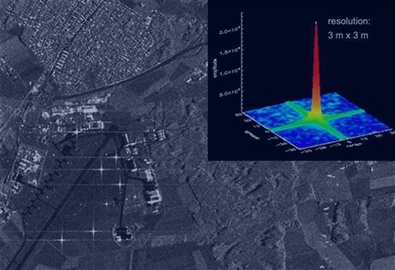
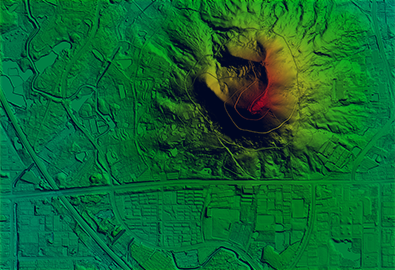
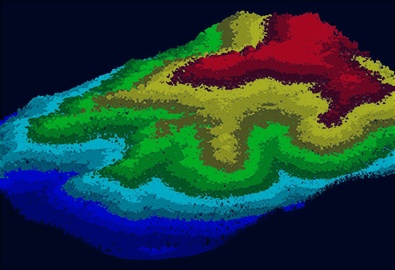
SAR 衛星主要有高(gāo)分(fēn)三号、海絲一号、齊魯一号等。SAR 具備全天時(shí)、全天候.全球覆蓋的(de)觀測特性以及一定的(de)穿透能力,結合合成孔徑雷達于涉測量 (interferometric synthetic aperture radar,InSAR)技術,能夠獲取地球表面精确高(gāo)程信息,主要用(yòng)于生産高(gāo)精度 DEM、DSM,滿足地形級實景三維構建需求。
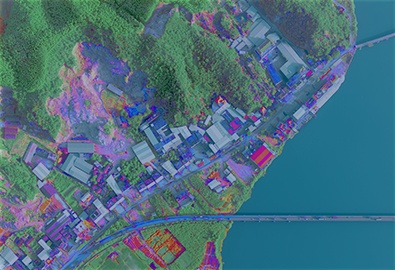
立體測繪衛星主要有高(gāo)分(fēn)七号、高(gāo)景一号、資源三号 02 等,采用(yòng)雙線陣或三線陣測繪方式,由具有一定交會角的(de)前視、正視和(hé)後視相機通(tōng)過對(duì)同一地面不同視角的(de)觀測形成立體影(yǐng)像,可(kě)以用(yòng)于 DEM、DSM 和(hé) DOM 制作。另外,立體測繪衛星能夠獲取地形、地貌以及城(chéng)市建築的(de)多(duō)視角影(yǐng)像數據,在紋理(lǐ)映射中可(kě)以作爲三維模型的(de)立面紋理(lǐ),制作更加精細的(de)三維模型。
目前,我國衛星遙感平台形成高(gāo)軌到低軌全面覆蓋、大(dà)衛星與小衛星相互協同态勢組成系列衛星星座,通(tōng)過搭載不同類型傳感器,提供不同分(fēn)辨率、不同角度、全方位全天候的(de)對(duì)地觀測數據,進一步支撐大(dà)範圍地形實景三維數據的(de)獲取。
航空遙感平台一般是指高(gāo)度在 80km 以下(xià)的(de)遙感平台,根據飛(fēi)機載人(rén)與否,可(kě)以将航空遙感平台分(fēn)爲有人(rén)機航空遙感與無人(rén)機航空遙感,這(zhè)兩種航空遙感平台各有優劣,根據航空遙感平台不同,搭載的(de)數據采集裝備也(yě)有所區(qū)别。

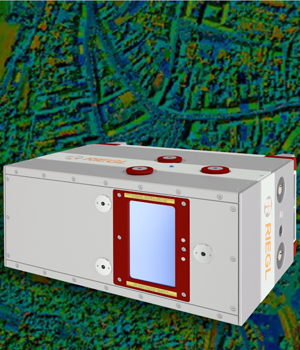
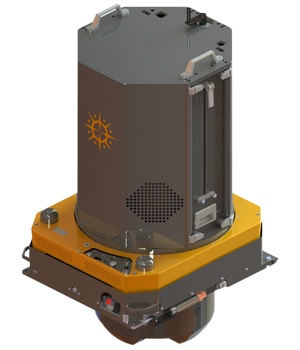
有人(rén)機航空遙感一般采用(yòng)大(dà)飛(fēi)機搭載大(dà)型量測相機或激光(guāng)雷達的(de)方式進行數據采集,能夠執行較高(gāo)航高(gāo)的(de)長(cháng)時(shí)間飛(fēi)行。其承載能力較強,可(kě)以搭載例如 PAN-U5、SWDC-5 等傾斜航攝儀、RIEGLVQ-780I-S 機載激光(guāng)掃描儀等大(dà)型設備,從而獲取大(dà)畫(huà)幅、高(gāo)精度的(de)影(yǐng)像或激光(guāng)點雲數據,在大(dà)面積區(qū)域的(de)數據獲取具有較大(dà)優勢。同時(shí)由于其成果畸變小、畫(huà)幅大(dà),實景三維建模難度較低、模型精度較高(gāo)。其不足之處在于.成本相對(duì)高(gāo)昂,航高(gāo)較高(gāo),數據獲取效率易受霧霾、雲層等天氣的(de)影(yǐng)響。常見用(yòng)于航空遙感的(de)有人(rén)機有塞斯納 208B、PC-6 等載人(rén)飛(fēi)機。
無人(rén)機航空遙感一般搭載小型輕量級的(de)傾斜相機或激光(guāng)雷達進行實景三維數據采集。由于無人(rén)機小巧、輕便,在小面積區(qū)域工作有較大(dà)優勢,成本相對(duì)低廉;由于相幅小,在大(dà)面積區(qū)域,獲取的(de)影(yǐng)像數量較多(duō),對(duì)處理(lǐ)技術有較大(dà)的(de)挑戰;另外,由于飛(fēi)行航高(gāo)較低,在城(chéng)市的(de)密集高(gāo)樓區(qū)域難以開展一般航飛(fēi),需要設計航線考慮避免更多(duō)危險因素。無人(rén)機主要分(fēn)爲三大(dà)類,一是固定翼無人(rén)機,其飛(fēi)行原理(lǐ)與飛(fēi)機相似,具備飛(fēi)行速度快(kuài)、運載能力強、續航時(shí)間長(cháng)、飛(fēi)行穩定等優點,起飛(fēi)降落通(tōng)常需要跑道輔助;二是多(duō)旋翼無人(rén)機,具備操作簡單、輕便、垂直起降、可(kě)懸停的(de)優點,但飛(fēi)行時(shí)間較短且運載能力較弱,常見的(de)有大(dà)疆經緯 M300、飛(fēi)馬 D2000 等;三是可(kě)垂直起降的(de)固定翼無人(rén)機,結合了(le)上述兩類無人(rén)機的(de)優勢,例如成都縱橫CW-15、飛(fēi)馬V-10等。
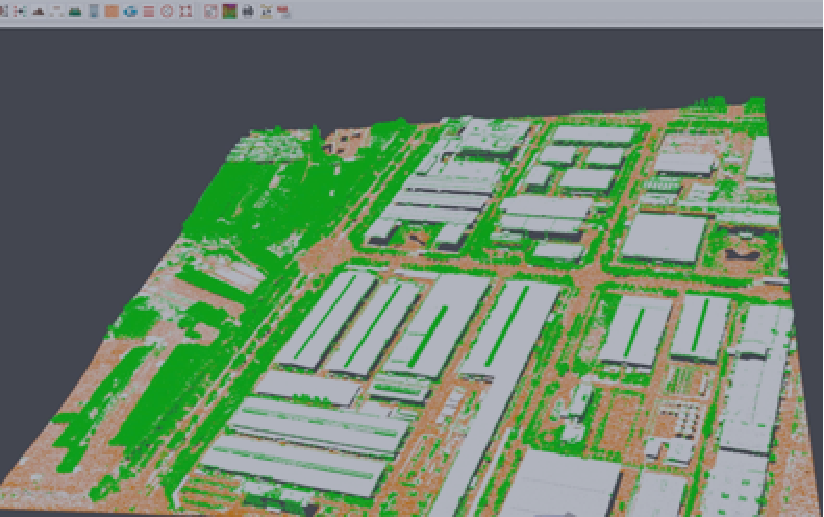
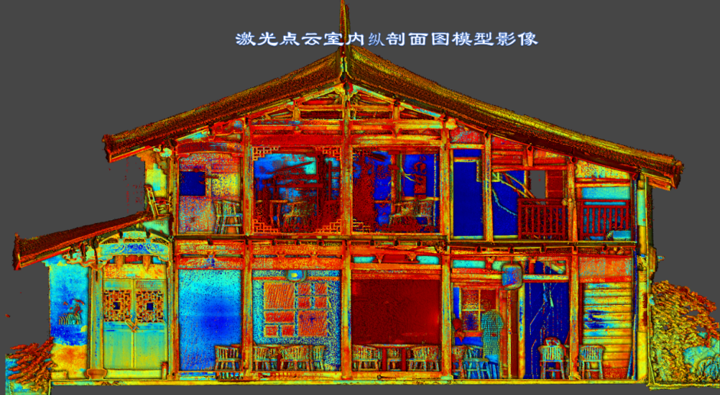
針對(duì)城(chéng)市中複雜(zá)場(chǎng)景、室内、地下(xià)管線等衛星遙感以及航空攝影(yǐng)手段難以獲取數控的(de)對(duì)象,可(kě)在地面進行數據采集,如圖 2-2 所示。實景三維地面數據采集主要有車載背包、手持等方式,通(tōng)過将激光(guāng)掃描儀、影(yǐng)像采集設備、定位定姿設備、同步控制器等多(duō)傳感器集成于一體,并根據采集需求将設備搭載在測量車上,對(duì)建築、道路進行高(gāo)精度實景三維數據采集,或通(tōng)過背包、手持的(de)方式對(duì)室内室外、地下(xià)管線進行數據采集。
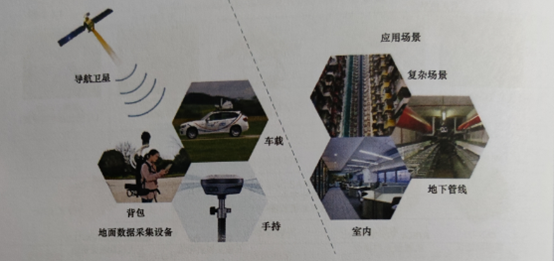
圖 2-2地面數據收集
我國地面數據采集設備近年取得(de)較大(dà)突破,滿足各項工作需求。例如立得(de)空間設計的(de)三維全景激光(guāng)背包俠将多(duō)線激光(guāng)雷達、全景相機、慣導設備、同步控制器等集成于體,以移動測量技術系統爲基礎,能夠針對(duì)室内、室外或地下(xià)場(chǎng)景進行三維激光(guāng)全景數據的(de)采集,同時(shí)采用(yòng) 3D-SLAM 技術解決室内定位的(de)問題。該設備具有采集效率高(gāo)、速度快(kuài)、操作簡便等特點,作業過程不受階梯、路面起伏的(de)影(yǐng)響,可(kě)廣泛應用(yòng)于商場(chǎng)、變電站、地鐵、隧道、礦洞等各類場(chǎng)景的(de)數據獲取;中海達的(de) iRTK-10 機身輕巧,方便快(kuài)速測量,搜索解算(suàn)衛星高(gāo)達 50 餘顆,同時(shí)支持單北(běi)鬥解算(suàn),信号接收靈敏且抗幹擾能力強,采用(yòng)新型慣導設備,内置全國連續運行衛星定位服務系統 (continuously operating reference stations,CORS)服務,将實時(shí)差分(fēn)定位(real-time kinematic,RTK技術與近景攝影(yǐng)測量技術相結合,能夠在地面采集影(yǐng)像同時(shí)獲取相機位置、姿态信息在地面拍(pāi)攝的(de)位置、角度與航測視角天然互補,用(yòng)于“空天地”一體化(huà)影(yǐng)像數據采集可(kě)以有效補充建築物(wù)局部細節、紋理(lǐ)等信息,外業操作簡便、工作效率較高(gāo),相比激光(guāng)掃描的(de)方式成本更低。
地面采集的(de)方式消耗大(dà)量人(rén)力,成本較高(gāo),但可(kě)以解決無人(rén)機等航空遙感平台由于視角有限或飛(fēi)行困難,導緻的(de)房(fáng)檐下(xià)以及被遮擋物(wù)體等區(qū)域建模後扭曲、空洞、紋理(lǐ)缺失等問題。采用(yòng)三維激光(guāng)掃描技術或地面影(yǐng)像 RTK 技術與航空攝影(yǐng)結合的(de)方式,形成的(de)實景三維數據具有較高(gāo)的(de)精細度和(hé)還(hái)原度,可(kě)以構建高(gāo)精度部件級三維模型。
實景三維作爲專用(yòng)名詞術語,其定義爲 “實景三維是對(duì)一定範圍内人(rén)類生産、生活和(hé)生态空間進行真實、立體、時(shí)序化(huà)反映和(hé)表達的(de)數字空間,是新型基礎測繪的(de)标準化(huà)産品,是國家重要的(de)新型...

景三維作爲真實、立體、時(shí)序化(huà)反映人(rén)類生産、生活和(hé)生态空間的(de)時(shí)空信息,是國家重要的(de)...
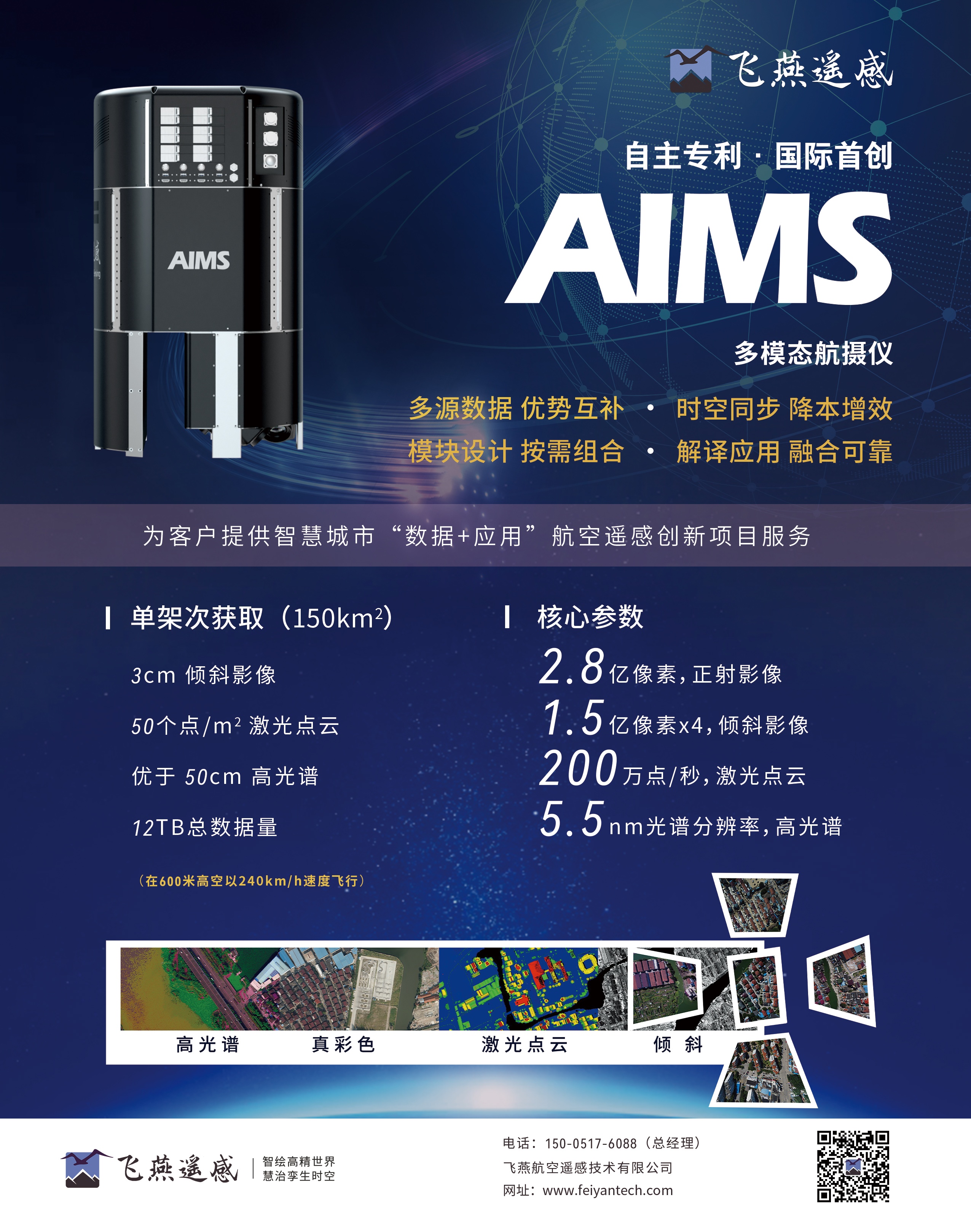
飛(fēi)燕遙感打造了(le)“AIMS多(duō)模态航空遙感一站式解決方案”。近三年,已在上海、廣州、香港...
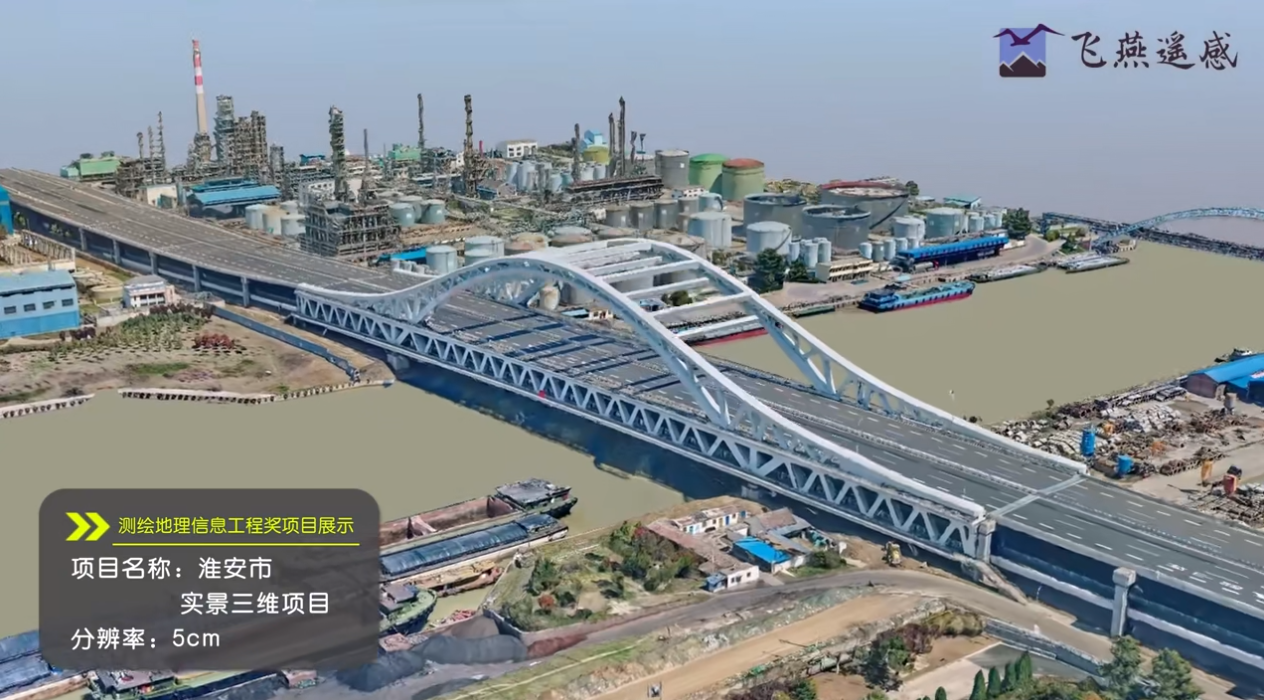
近日,淮安市自然資源和(hé)規劃局在南(nán)京組織召開了(le)“2023年度實景三維淮安建設”項目驗收...
項目成果爲江蘇智慧城(chéng)市建設、空間規劃等領域提供了(le)堅實的(de)數據支撐與決策依據,在項目...

武漢新型基礎測繪項目采用(yòng)了(le)飛(fēi)燕遙感的(de)AIMS多(duō)源航空遙感解決方案,此方案優勢在于一次...
電話(huà):025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南(nán)京市玄武區(qū)紅山街(jiē)道領智路56
号星河(hé)World産業園3号樓北(běi)8樓

微信公衆号

總經理(lǐ)微信
版權所有:廣東中科遙感技術有限公司 © 2019 備案号:  鄂公網安備:420106020021194号
鄂公網安備:420106020021194号  簡體中文/English
簡體中文/English