近年來(lái),随著(zhe)CCD技術的(de)發展,數字航空攝影(yǐng)測量已成爲航測中研究與應用(yòng)的(de)熱(rè)點,其相對(duì)于傳統膠片有明(míng)顯的(de)優越性,但航空攝影(yǐng)用(yòng)數碼相機取代膠片式相機成爲數字航空攝影(yǐng)測量的(de)關鍵設備。傳統航測所采用(yòng)的(de)相機爲量測相機,其光(guāng)學畸變小,它可(kě)測定内方位元素,有框标裝置,其機械結構穩固,攝影(yǐng)中心相對(duì)所拍(pāi)攝影(yǐng)像的(de)相對(duì)位置是經過嚴格檢校的(de)。但是使用(yòng)膠片相機不僅價格昂貴,還(hái)要用(yòng)昂貴的(de)儀器對(duì)膠片影(yǐng)像數字化(huà),而且膠片動态範圍小,故航攝數據質量低,測圖周期長(cháng),影(yǐng)響了(le)整個(gè)行業進步。目前市場(chǎng)上缺乏測量專用(yòng)的(de)數碼相機,航空攝影(yǐng)測量作業中使用(yòng)的(de)相機大(dà)多(duō)是使用(yòng)高(gāo)檔的(de)商業相機,沒有檢校出内方位元素,鏡頭畸變大(dà),爲了(le)将數碼相機應用(yòng)于航空攝影(yǐng)測量,關鍵一步就是對(duì)相機進行嚴格的(de)檢校,求出相機的(de)内方位元素及各項畸變參數,以便在數據後處理(lǐ)中消除影(yǐng)像的(de)畸變差,使其達到航空攝影(yǐng)測量作業的(de)要求。本文通(tōng)過分(fēn)析數碼相機的(de)誤差來(lái)源,主流校驗方法的(de)比較,討(tǎo)論測定數碼相機校驗的(de)目的(de),利用(yòng)對(duì)數碼像機檢校數學模型的(de)建立、檢校場(chǎng)的(de)建立,驗證相機内參數的(de)可(kě)靠性,最後用(yòng)實例應用(yòng)證明(míng)了(le)檢校的(de)高(gāo)精度性、可(kě)靠性與可(kě)行性。

1 數碼相機的(de)誤差來(lái)源
數碼相機是利用(yòng)CCD( Charge Coupled Device)将入射相機鏡頭的(de)光(guāng)輻射能量轉化(huà)爲數字影(yǐng)像的(de),CCD傳感器感光(guāng)元的(de)數量爲衡量數碼相機性能的(de)重要指标[1]。數碼相機的(de)誤差不僅可(kě)由光(guāng)學鏡頭的(de)畸變與機械誤差引起,還(hái)可(kě)能由視頻(pín)信号的(de)A/D轉換産生,分(fēn)别稱爲光(guāng)學畸變差、機械誤差和(hé)電學誤差。光(guāng)學畸變是影(yǐng)響像點坐(zuò)标質量的(de)一項重要誤差,主要是由相機物(wù)鏡系統設計、制作和(hé)裝配所引起的(de)像點偏離其理(lǐ)想位置的(de)點位誤差,光(guāng)學畸變可(kě)分(fēn)爲徑向畸變差和(hé)偏心畸變差兩類;機械誤差是在光(guāng)學鏡頭獲取的(de)影(yǐng)像轉化(huà)到數字化(huà)陣列影(yǐng)像這(zhè)一步産生的(de)誤差,主要由以下(xià)兩個(gè)因素引起:一是掃描陣列不平行于光(guāng)學影(yǐng)像,緻使數字化(huà)影(yǐng)像相對(duì)于光(guāng)學影(yǐng)像有旋轉;二是每個(gè)陣列元素尺寸不同而産生不均勻變形。電學誤差主要包括行同步誤差、場(chǎng)同步誤差及數據格式轉換時(shí)的(de)采樣誤差。
2 當前主流檢校方法的(de)比較
當前主要的(de)檢校方法大(dà)體上分(fēn)兩類:一類是直接線性變換解法,但它因無需内方位元素值和(hé)外方元素的(de)初始近似值,故僅适用(yòng)于非量測相機所攝影(yǐng)像的(de)攝影(yǐng)測量處理(lǐ);另一類是一種基于空間後方交會的(de)檢校方法,它以共線方程爲基礎,以像點坐(zuò)标作爲觀測值,解求相機内外方位元素、畸變系數以及其他(tā)附加參數的(de)檢校方法。這(zhè)種方法正好适合解決數碼相機所遇到的(de)問題,因而本文利用(yòng)此方法來(lái)檢校,并且已經在生産實踐中産生了(le)不錯的(de)結果。
3 數碼相機的(de)檢校
當前使用(yòng)的(de)主流相機是非量測相機,存在光(guāng)學畸變和(hé)電的(de)、機械的(de)等誤差。因而對(duì)數碼相機的(de)檢校内容包括①主點(x,y)的(de)位置測定;②主距(f)測定;③光(guāng)學畸變系數測定。
3.1 檢校的(de)目的(de)及數學模型
數字相機檢校的(de)目的(de)是恢複影(yǐng)像光(guāng)束的(de)正确形狀,即通(tōng)過檢校獲取影(yǐng)像的(de)内方位元素和(hé)各項畸變系數。前面已經提到本檢校是基于一種空間後方交會的(de)檢校方法[3]。它是以共線方程作爲基礎,以像點坐(zuò)标作爲觀測值,解求相機内外方位元素、畸變系數以及其他(tā)附加參數的(de)一種檢校方法。共線方程式爲
其中,(x,y)爲像點的(de)像平面坐(zuò)标;f爲影(yǐng)像的(de)内方位元素;(X,Y,Z)爲物(wù)方點的(de)空間坐(zuò)标;a,b,c(i=1,2,3)爲影(yǐng)像的(de)3個(gè)外方位角元素組成的(de)9個(gè)方向餘弦;X表示影(yǐng)像的(de)外方位元素;X表示影(yǐng)像的(de)内方位元素;X表示一些附加的(de)參數,主要是光(guāng)學畸變改正項。
3.2 檢校場(chǎng)的(de)改造
3.2.1 原有檢校場(chǎng)
對(duì)檢校場(chǎng)的(de)要求:
(1)相機在“無窮遠(yuǎn)”處能獲得(de)滿像幅的(de)檢校場(chǎng)圖像;(2)檢校場(chǎng)要有一定的(de)層次來(lái)布設标志點;(3)相機可(kě)在不同攝站位置進行拍(pāi)攝。
本次檢測對(duì)象爲佳能5D系列數字相機,其分(fēn)辨率爲5616×3744,标稱焦距爲35mm,影(yǐng)像以RAW格式存儲輸出[4]。使用(yòng)室外檢校場(chǎng)是在某樓正立面布設了(le)近千個(gè)間隔爲1.0~2.5m的(de)控制點标志;該樓高(gāo)約30m,寬約爲100m,牆體有電梯、走廊和(hé)凹槽,構成了(le)前後四個(gè)層次的(de)立體結構。拍(pāi)攝點爲距離檢校場(chǎng)大(dà)40m以外,與焦距相比,可(kě)視爲無窮遠(yuǎn)處,獲取的(de)影(yǐng)像能充滿像幅。
3.2.2 控制點标志及空間定位數據的(de)獲取
對(duì)于控制場(chǎng)标志點的(de)選取最初制定了(le)多(duō)套方案,包括材料、形狀等,爲了(le)提高(gāo)控制點坐(zuò)标的(de)獲取效率和(hé)長(cháng)期使用(yòng)的(de)目的(de),經過多(duō)次反複的(de)測試控制點标志由黑(hēi)色的(de)鋁片做(zuò)成,并且創性地在鋁片中間粘貼了(le)全站儀棱鏡反光(guāng)片[5]。此檢校場(chǎng)是在成熟的(de)原檢校場(chǎng)的(de)基礎上通(tōng)過擴展、加密布設後形成的(de)。在控制點外業測量中用(yòng)全站儀使用(yòng)全圓測回法(半測回)進行測量,之後内業進行數據處理(lǐ)計算(suàn)得(de)到每個(gè)點位的(de)精确坐(zuò)标。

3.3 參數可(kě)靠性驗證
基于像點系統誤差改正模型和(hé)像主點坐(zuò)标,用(yòng)VC++6.0編寫了(le)相應程序,對(duì)所拍(pāi)攝像片進行畸變差改正,并進行重采樣;随後檢校軟件對(duì)重采樣後相片經重新求取各系統誤差參數與内方位元素,通(tōng)過解算(suàn)軟件查看相片畸變差,影(yǐng)像最大(dà)畸變小于1微米(一個(gè)像元爲9微米×9 微米),已在限值範圍内。
4 結束語
通(tōng)過上述分(fēn)析可(kě)以得(de)到以下(xià)幾點結論:
第一,對(duì)于大(dà)面陣數碼相機,基于室外控制場(chǎng)的(de)檢校具有精度高(gāo)并且可(kě)靠的(de)特點;
第二,在建立檢校場(chǎng)時(shí),控制标志點應該盡量均勻分(fēn)布,并且需在3個(gè)坐(zuò)标方向上有一定的(de)延伸,以免造成線性方程的(de)強相關;
第三,對(duì)于航空用(yòng)數碼相機,像點很小的(de)誤差都會給物(wù)方點位精度帶來(lái)比較大(dà)的(de)影(yǐng)響;
第四,航空數碼相機檢校存在主距的(de)鎖定與相機固定問題,在相機檢校之前需考慮如何将其機械固定又不影(yǐng)響相機的(de)操作。大(dà)型室外航空攝影(yǐng)數碼相機檢校場(chǎng)的(de)創新設計建設,再加上高(gāo)精度的(de)相機檢校方法,隻要按照(zhào)既定操作步驟即使非專業人(rén)士也(yě)能夠得(de)出高(gāo)精度的(de)相機檢校數據。這(zhè)對(duì)今後航空攝影(yǐng)數碼相機的(de)應用(yòng)範圍擴展了(le)空間,隻要是能滿足一定條件的(de)高(gāo)檔普通(tōng)攝影(yǐng)數碼相機完全可(kě)以達到攝影(yǐng)測量的(de)高(gāo)精度、大(dà)視場(chǎng)角要求,從而加速了(le)航空攝影(yǐng)測量的(de)更進一步發展。
文章(zhāng)來(lái)源于網絡,登載此文出于傳遞更多(duō)信息之目的(de),版權歸原作者及刊載媒體所有,如本文中圖片或文字侵犯您的(de)權益,請聯系我們。
猜你喜歡:

ADS系列數字航攝儀應用(yòng)的(de)是推掃式攝影(yǐng)方式,應用(yòng)POS系統進行數字影(yǐng)像獲取。在航空攝影(yǐng)測量中應用(yòng)ADS系列數字航攝儀,可(kě)以不經過掃描便可(kě)以直接爲遙感圖像處理(lǐ)系統及數字攝影(yǐng)測量提供全色...

與傳統的(de)測繪技術相比,高(gāo)空攝影(yǐng)技術可(kě)以對(duì)高(gāo)空大(dà)比例尺的(de)地形圖進行較爲準确的(de)測繪。...
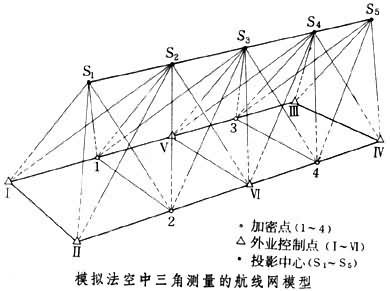
航空攝影(yǐng)測量技術中的(de)空中三角測量,是在立體攝影(yǐng)測量實踐中參照(zhào)少部分(fēn)野外控制點,并...

作爲一種通(tōng)過空間數據得(de)到核心技術處理(lǐ)的(de)綜合技術,技術應用(yòng)過程中需要從技術層面分(fēn)析...
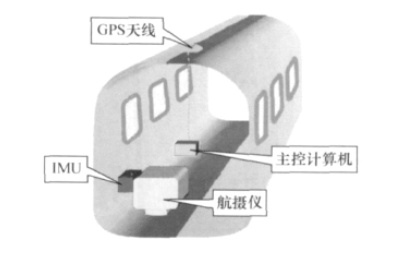
POS輔助空中三角測量的(de)第一步是要采用(yòng)載波相位動态GPS定位技術測定攝站的(de)空間位置(簡...
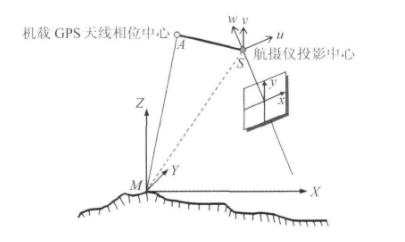
當代航空攝影(yǐng)測量加密方式中的(de)GPS輔助光(guāng)束法區(qū)域網平差,相位中心一般會被放置在航空G...
電話(huà):025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南(nán)京市玄武區(qū)紅山街(jiē)道領智路56
号星河(hé)World産業園3号樓北(běi)8樓

微信公衆号

總經理(lǐ)微信
版權所有:廣東中科遙感技術有限公司 © 2019 備案号:  鄂公網安備:420106020021194号
鄂公網安備:420106020021194号  簡體中文/English
簡體中文/English