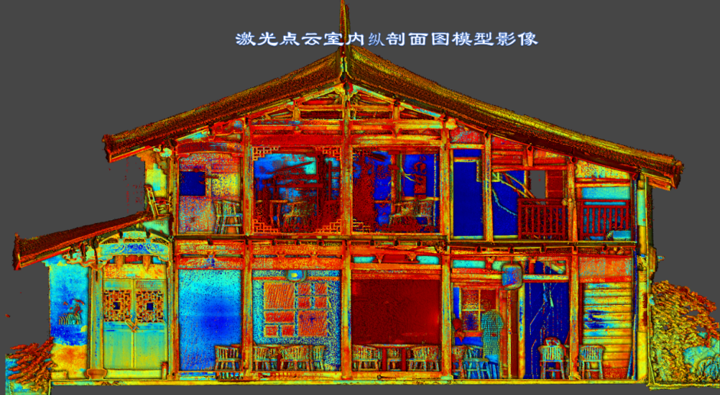
海岸帶是海洋與陸地之間的(de)過渡地帶,受海洋系統和(hé)陸地系統的(de)相互作用(yòng),随著(zhe)海洋開發領域的(de)日益拓展以及海域、海岸資源開發利用(yòng)強度和(hé)密度的(de)進一步加大(dà),對(duì)海岸帶區(qū)域的(de)變化(huà)監測已顯得(de)尤爲重要。海岸帶區(qū)域由于地形複雜(zá),分(fēn)布有基岩、灘塗、紅樹林(lín)及沙灘等,許多(duō)區(qū)域難以進人(rén)開展控制點的(de)布設與測量;這(zhè)種難以施測的(de)問題同時(shí)也(yě)造成了(le)灘塗海岸地區(qū)測量精度低下(xià),采用(yòng)實地測量方式具有施測周期長(cháng)、工作量大(dà)、費時(shí)費力的(de)問題。應用(yòng)機載LiDAR進行海岸帶地形測繪具有大(dà)範圍、低成本、周期短、精度高(gāo)、能有效祛除植被的(de)特點。
機載激光(guāng)雷達(Light Detection And Ranging,LiDAR)集成了(le)激光(guāng)測系統、全球衛星導航系統(Global Navigation Satellite System,GNSS)與慣性測量系統(Inertial Measurement Unit,IMU)集高(gāo)分(fēn)辨率航空數碼相機技術于一體的(de)空間測量技術,能夠快(kuài)速、準确地獲取地表三維空間信息。它具有較強的(de)植被穿透性、更短的(de)作業周期以及更低的(de)生産成本;将獲取的(de)LiDAR激光(guāng)點雲數據經過處理(lǐ)與編輯,最終能得(de)到測區(qū)的(de)DSM、DEM、DOM、DLG等地形圖産品,基于這(zhè)些特點,它在城(chéng)市三維建模、資源勘察、森林(lín)調查、地形測繪、災害監測、海島海岸帶調查等方面的(de)應用(yòng)具有獨特優勢。
1、 測區(qū)範圍及實施過程
1.1 測區(qū)範圍
新會港至銀湖灣沿岸,測繪岸線(潮間帶)200m範圍,測區(qū)岸線長(cháng)約80km,由于該區(qū)域岸線主要以人(rén)工堤岸爲主,岸線位置界定在堤岸坡頂外緣線,向海一側獲取0.5m分(fēn)辨率DOM、DEM以1∶2000地形圖(DLG),成果坐(zuò)标系統采用(yòng)WGS-84、CGCS2000,高(gāo)程系統采用(yòng)1985國家高(gāo)程基準。
1.2 實施過程
本次項目采用(yòng)機載激光(guāng)雷達(LiDAR)掃描技術,航飛(fēi)平台爲運-5飛(fēi)機,設備爲美(měi)國天寶公司的(de)Harrier68i系統。數碼相機爲Rollei Metric AIC Pro65;慣導系統型号爲Applanix POS/AV 系列,采樣頻(pín)率200Hz;激光(guāng)掃描儀的(de)型号爲Riegl LMS-Q680i,最大(dà)脈沖頻(pín)率400kHz,掃描角度45°/60°,相對(duì)航高(gāo)H爲1200m,航向重疊度爲60%,旁向重疊度爲30%,Lidar數據點密度1.72點/m2,測區(qū)範圍共布設12條航線。
(1)地面參考站布設。本次航飛(fēi)測量共布設了(le)7個(gè)四級GPS點作爲地面參考站點。地面靜态基站設備使用(yòng)天寶5700和(hé)天寶5800雙頻(pín)GPS接收機,采用(yòng)地面靜态基站模式進行數據采集,采樣間隔爲1s。
(2)參考面布設。參考面布設是爲了(le)糾正激光(guāng)點的(de)平面和(hé)高(gāo)程數據,平面主要采集公路斑馬線或球場(chǎng)角等地面上的(de)明(míng)顯分(fēn)界線,高(gāo)程主要采集比較平整的(de)堅硬地面、球場(chǎng)硬化(huà)平整區(qū)域等,通(tōng)過參考面區(qū)域的(de)平面和(hé)高(gāo)程對(duì)比糾正,求出測區(qū)的(de)改正參數,可(kě)以糾正測區(qū)的(de)激光(guāng)點平面及高(gāo)程數據。爲保證數據處理(lǐ)的(de)精度,消除系統誤差,在測區(qū)範圍内測量部分(fēn)高(gāo)程和(hé)平面參考數據,本項目共做(zuò)了(le)8個(gè)參考面。
(3)參考面測量。參考面平面和(hé)高(gāo)程都采用(yòng)GPS-RTK,平面測量主要采集路邊線和(hé)有規則的(de)房(fáng)屋等,每處一般爲20個(gè),總點數不少于10個(gè)。參考面高(gāo)程測量選在比較平整的(de)堅硬地面,旁邊無障礙物(wù)阻擋。采集高(gāo)程數據點間距爲1~2m,總點數不少于20個(gè)。
應用(yòng).jpg")
2、 LiDAR及原始影(yǐng)像數據預處理(lǐ)
LiDAR數據主要采用(yòng)TOPPIT軟件處理(lǐ),POS數據采用(yòng)POSPAC軟件處理(lǐ),影(yǐng)像數據采用(yòng)INPHO_orthovista軟件處理(lǐ)。
(1)導航文件制作:利用(yòng)POS姿态數據與地面GPS基站數據聯合處理(lǐ),獲取導航數據文件,處理(lǐ)過程中要查看導航數據的(de)起止時(shí)間是否與實際飛(fēi)行時(shí)間匹配,飛(fēi)行軌迹是否完整,無中斷;導航數據精度指标是否滿足要求,注意查看衛星質量圖。
(2)控制文件制作:檢查航帶是否存在漏飛(fēi)現象的(de)同時(shí)通(tōng)過覆蓋數據範圍制作控制文件,檢查激光(guāng)數據和(hé)影(yǐng)像數據是否覆蓋了(le)整個(gè)測區(qū)範圍,是否有數據漏洞、條帶遺失。
(3)三維激光(guāng)點雲坐(zuò)标計算(suàn)(預處理(lǐ)+航帶校正):将原始激光(guāng)數據進行預處理(lǐ)生成原始的(de)三維激光(guāng)點雲數據,然後将原始點雲數據依據實測的(de)平面和(hé)高(gāo)程控制點進行平面和(hé)高(gāo)程校正,計算(suàn)出地表目标物(wù)的(de)空間三維坐(zuò)标。
3、 LiDAR數據後處理(lǐ)
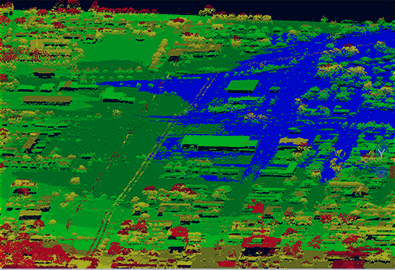
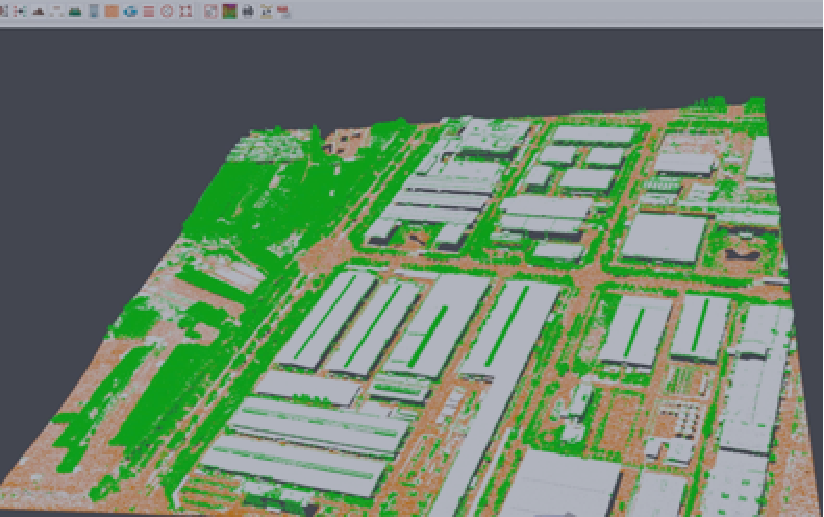
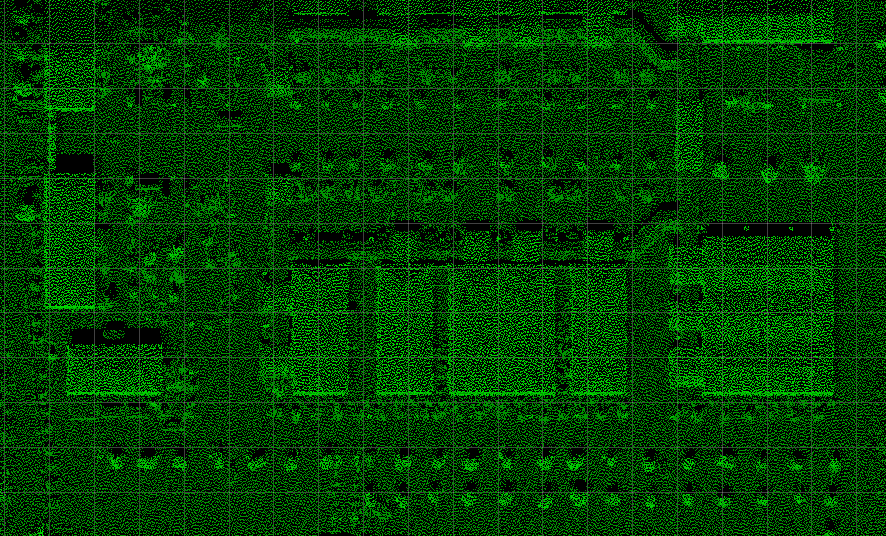
3.1 激光(guāng)點雲分(fēn)類
用(yòng)TerraSolid軟件基于不規則三角網原理(lǐ),通(tōng)過設定參數阈值進行濾波,濾波出分(fēn)離地面點和(hé)非地面點,阈值大(dà)小設置取決于測區(qū)的(de)地形以及植被的(de)高(gāo)低、密度等。将分(fēn)離出來(lái)的(de)非地面點進行細分(fēn):根據點的(de)高(gāo)度、分(fēn)布的(de)形狀、密度、坡度等特征,對(duì)非地面點雲進行分(fēn)類。
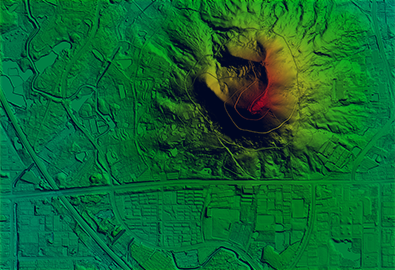
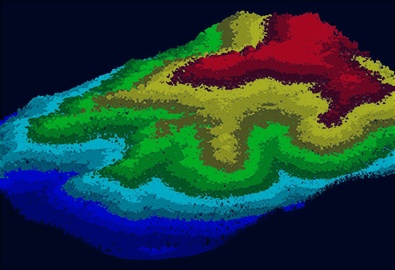
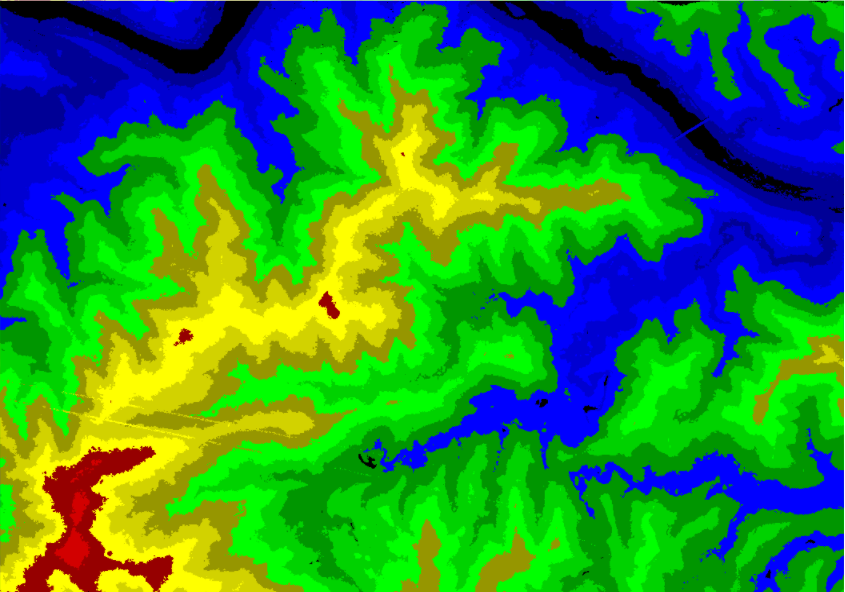
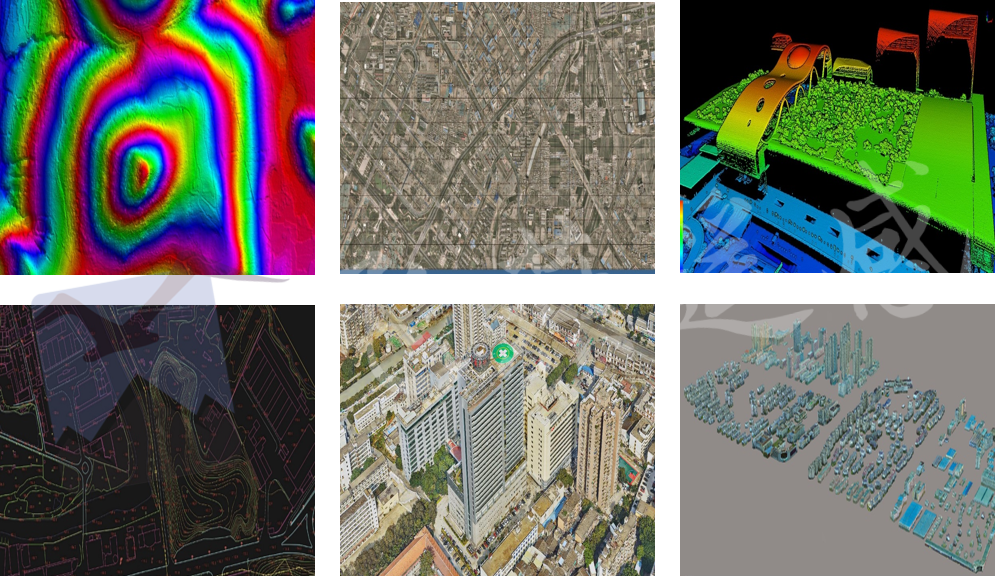
3.2 DEM制作
制作DEM主要采用(yòng)TOPPit軟件,DEM是用(yòng)激光(guāng)數據的(de)末次回波生成的(de),是在用(yòng)末次回波制作的(de)DSM的(de)基礎上過濾掉地表高(gāo)于地面的(de)物(wù)體(如樹木(mù).房(fáng)屋等)後生成的(de)起伏的(de)地面模型,主要過程爲:
(1)格網化(huà),将經過校正的(de)點雲數據根據其坐(zuò)标值按照(zhào)一定的(de)點間隔插入到規則格網中;
(2)填補小縫隙,将影(yǐng)像中存在的(de)小縫隙、小黑(hēi)洞用(yòng)其周圍點的(de)灰度值填充起來(lái),使其有高(gāo)程值;
(3)去除粗差點,将比地面點或者地物(wù)點高(gāo)很多(duō)的(de)粗差點去除;
(4)生成浮雕影(yǐng)像,将經過填充和(hé)去除粗差點處理(lǐ)的(de)點雲數據生成浮雕影(yǐng)像,使點雲數據生成三維模型,以便更直觀的(de)反映地表的(de)情況;
(5)過濾,對(duì)經過填充和(hé)去除粗差點處理(lǐ)的(de)點雲過濾處理(lǐ),将地表的(de)一些地物(wù)(如房(fáng)屋,植被地物(wù)等)濾除掉;
(6)手工編輯,用(yòng)程序自動過濾後,往往有些地物(wù)都沒有過濾幹淨,因此需要人(rén)工幹預處理(lǐ),将未過濾掉的(de)地物(wù)手工擦除;
(7)經過過濾後影(yǐng)像上存有很多(duō)黑(hēi)洞,需應用(yòng)黑(hēi)洞周圍的(de)點高(gāo)程值内插,使地面平坦、連續;
(8)裁剪重疊區(qū),将每幅影(yǐng)像邊緣的(de)重疊區(qū)裁剪掉,生成DEM模型。
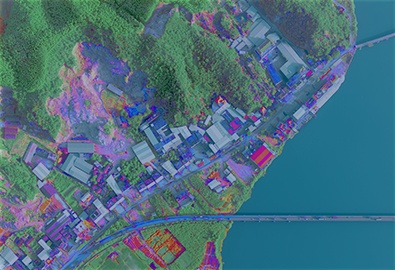
3.3 DOM制作
對(duì)LiDAR數據同步獲取的(de)航空遙感影(yǐng)像空間分(fēn)辨率爲0.18m,使用(yòng)LIDAR中生成的(de)DEM結合地面控制點數據對(duì)對(duì)影(yǐng)像進行正射校正,生成經過校正的(de)單幅正射影(yǐng)像,對(duì)正射影(yǐng)像進行勻色,對(duì)多(duō)幅影(yǐng)像進行拼接,制作适當的(de)影(yǐng)像鑲嵌線,根據鑲嵌線和(hé)勻色後的(de)影(yǐng)像進行分(fēn)幅處理(lǐ),最終獲取正射影(yǐng)像DOM。
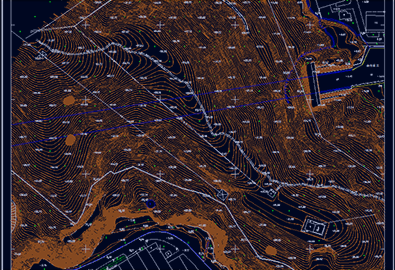
3.4 DLG制作
1∶2000DLG采用(yòng)“激光(guāng)點雲輔助正射影(yǐng)像進行矢量化(huà)法”進行繪制,外業調繪成圖。
先對(duì)正射影(yǐng)像和(hé)激光(guāng)點雲數據進行匹配,根據分(fēn)類後的(de)非地面點結合高(gāo)精度正射影(yǐng)像圖繪制明(míng)顯的(de)地物(wù),包括道路,房(fáng)屋,水(shuǐ)塘等、設施、田埂、陡坎、水(shuǐ)溝等要素。利用(yòng)DEM數據生成等高(gāo)線,對(duì)等高(gāo)線進行編輯、抽稀、圓滑等處理(lǐ),保留特征點,然後再對(duì)高(gāo)程标注。
4、 結語
機載LiDAR具有大(dà)範圍、快(kuài)速獲取地面高(gāo)精度三維坐(zuò)标,結合航空數碼影(yǐng)像能夠生産出大(dà)比例尺地形圖的(de)特點,尤其是在人(rén)工不宜作業的(de)區(qū)域,優勢就更爲明(míng)顯,本次獲取的(de)海岸帶大(dà)比例尺地形圖對(duì)于江門市海岸地形變化(huà)監測、岸線變遷、風暴潮淹沒分(fēn)析、災害預警和(hé)災害評估等可(kě)發揮重要的(de)作用(yòng)。
猜你喜歡:
版權聲明(míng):文章(zhāng)來(lái)源于網絡,登載此文出于傳遞更多(duō)信息之目的(de),版權歸原作者及刊載媒體所有,如本文中圖片或文字侵犯您的(de)權益,請聯系我們。
燕航空遙感公衆号二維碼.jpg")

繼國家基礎地理(lǐ)信息中心委托的(de)吐魯番地區(qū)無人(rén)機航攝項目驗收後,贛南(nán)地區(qū)航攝項目也(yě)按時(shí)完成任務,圓滿通(tōng)過驗收,成功獲取了(le)贛南(nán)地區(qū)超5萬平方公裏的(de)數字影(yǐng)像。 該項目時(shí)間緊、任務重...
飛(fēi)燕遙感攜實景三維全流程産品體系與解決方案亮相大(dà)會,展示了(le)多(duō)模态新型數據采集裝備...

飛(fēi)燕遙感組織開展了(le)2023年測繪法宣傳日暨國家版圖意識宣傳活動。通(tōng)過近年的(de)宣傳展闆、...

3月(yuè)26日,江蘇師範大(dà)學地理(lǐ)測繪與城(chéng)鄉規劃學院黨委副書(shū)記劉潔帶隊赴飛(fēi)燕遙感,就人(rén)才培...
爲國家和(hé)測繪行業作出更多(duō)貢獻,是我們的(de)使命和(hé)追求。截至目前,飛(fēi)燕遙感2台AIMS多(duō)模态...
爲加強測繪地理(lǐ)信息行業的(de)溝通(tōng)交流,提升新型基礎測繪和(hé)實景三維建設的(de)技術與管理(lǐ)水(shuǐ)平...
電話(huà):025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南(nán)京市玄武區(qū)紅山街(jiē)道領智路56
号星河(hé)World産業園3号樓北(běi)8樓

微信公衆号

總經理(lǐ)微信
版權所有:廣東中科遙感技術有限公司 © 2019 備案号:  鄂公網安備:420106020021194号
鄂公網安備:420106020021194号  簡體中文/English
簡體中文/English