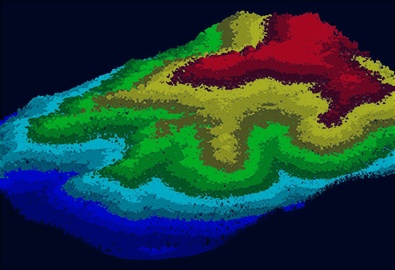
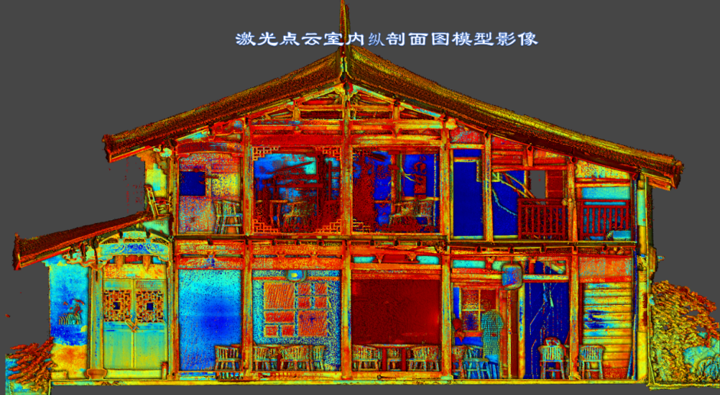
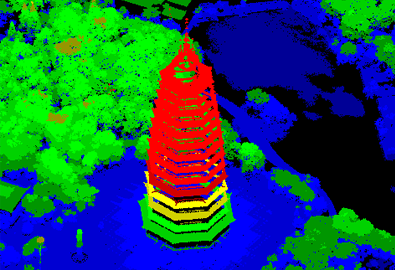
另外,傾斜航空攝影(yǐng)技術在近年來(lái)的(de)飛(fēi)迅發展,通(tōng)過密集匹配方法從多(duō)角度航空傾斜影(yǐng)像中獲取具有立面信息的(de)高(gāo)密度點雲,被稱爲傾斜攝影(yǐng)測量點雲。然而,這(zhè)些點雲數據并不具備語義信息,點雲分(fēn)類成爲點雲應用(yòng)的(de)關鍵所在,高(gāo)精度的(de)點雲分(fēn)類具有極大(dà)的(de)研究價值和(hé)現實意義。
目前,針對(duì)激光(guāng)點雲分(fēn)類的(de)方法較多(duō),但和(hé)傾斜航空攝影(yǐng)技術相比,激光(guāng)雷達技術掃描事獲取建築物(wù)立面的(de)點較少,所以傾斜攝影(yǐng)測量點雲的(de)應用(yòng)有著(zhe)廣泛的(de)需求,有學者提出一種面向對(duì)象的(de)傾斜攝影(yǐng)測量點雲監督分(fēn)類方法。
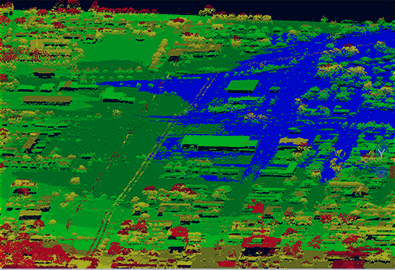
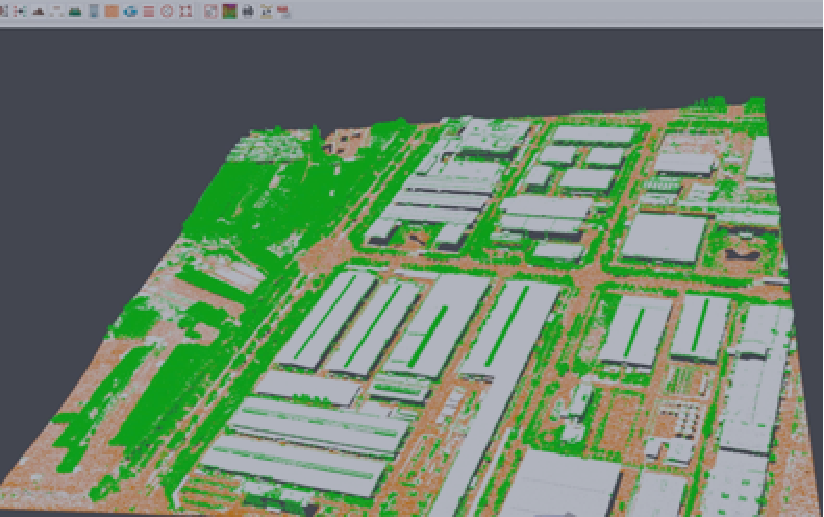
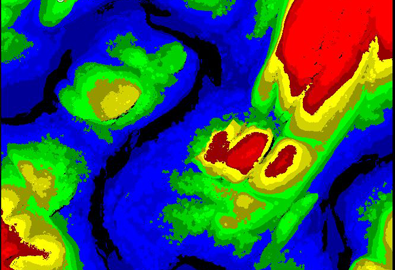
由于在監督分(fēn)類方法中,随機森林(lín)算(suàn)法和(hé) SVM 分(fēn)類精度相當,且在計算(suàn)效率、對(duì)異常值和(hé)噪聲的(de)魯棒性、内部誤差估計和(hé)變量重要性等方面具有優越性,因此本文采用(yòng)随機森林(lín)分(fēn)類器進行分(fēn)類。根據目标對(duì)象的(de)顔色和(hé)幾何等特征将點雲分(fēn)成屋頂、地面、植被和(hé)立面 4 類。
本文分(fēn)類方法采用(yòng)的(de)特征如下(xià):
1)法向量nx,ny和(hé)nz。每一點的(de)法向量定義爲對(duì)其k鄰域内的(de)點進行最小二乘以和(hé)得(de)到的(de)平面法向量。
2)顔色信息B,G和(hé)R。其值分(fēn)别爲影(yǐng)像每個(gè)像素藍光(guāng)、綠光(guāng)和(hé)紅光(guāng)3通(tōng)道的(de)DN值,在影(yǐng)像密集匹配時(shí)直接獲取。
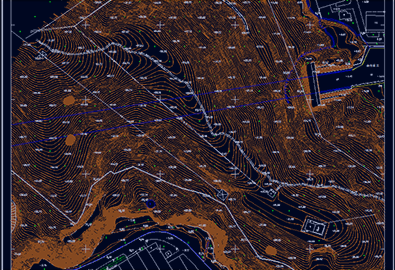
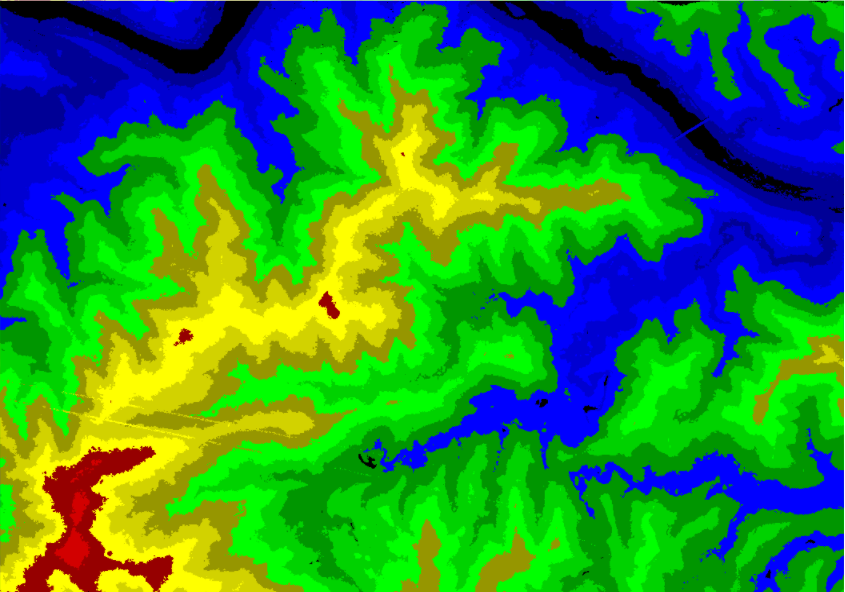
3)歸一化(huà)高(gāo)程Nz。本文利用(yòng)文獻(HuH,DingYL,ZhuQ,et...)方法分(fēn)離地面點并内插得(de)到數字地形模型(digitalterrainmodel,DTM),然後每一點減去DTM的(de)對(duì)應高(gāo)度以獲取歸一化(huà)高(gāo)度。
4)綠信比Gr。由于植被區(qū)域綠光(guāng)波段DN值一般比紅光(guāng)和(hé)藍光(guāng)波段DN值高(gāo),因此本文采用(yòng)綠信比來(lái)區(qū)分(fēn)植被[8],即Gr=G/(R+G+B)。
5)局部拟合平面垂直度fv。假設平面方程爲ax+by+cz+d=0,式中:x,y和(hé)z爲點的(de)坐(zuò)标;a,b,c和(hé)d爲平面拟合方程的(de)參數。那麽,fv定義爲fv(pi)=|c|,式中pi爲第i個(gè)點。fv的(de)取值範圍爲(0,1),當拟合平面接近于鉛垂面時(shí),fv的(de)值趨近于1。
6)局部平面拟合度fp。通(tōng)常情況下(xià),建築物(wù)屋頂比較規則,多(duō)由平面組成,而植被區(qū)表面不規則,因此平面拟合度可(kě)以作爲一個(gè)分(fēn)類特征,即

式中:n爲鄰域點數;dj爲第j個(gè)鄰域點到平面的(de)距離。計算(suàn)平面拟合度時(shí),利用(yòng)一定鄰域内的(de)點拟合一個(gè)平面,然後計算(suàn)所有拟合該平面的(de)點到該平面距離的(de)負數指數幂作爲fp。fp的(de)取值範圍爲(0,1),局部鄰域越接近于平面,fp的(de)值越小。
1.2對(duì)象分(fēn)割與特征計算(suàn)
采用(yòng)的(de)點雲軟件生成的(de)密集點雲,每一張影(yǐng)像對(duì)應一個(gè)點雲文件。并采用(yòng)間接的(de)方法獲得(de)點雲對(duì)象,即首先利用(yòng)簡單線性叠代聚類(SLIC)算(suàn)法将點雲對(duì)應的(de)影(yǐng)像分(fēn)割成超像素,該算(suàn)法僅需要指定超像素的(de)數量m;然後,利用(yòng)共線方程将點雲投影(yǐng)到影(yǐng)像上;再根據超像素分(fēn)割的(de)結果将點雲聚類成不同的(de)超體素,作爲分(fēn)類的(de)對(duì)象。
在獲取了(le)點雲對(duì)象之後,根據對(duì)象中所包含的(de)單點的(de)特征向量,采用(yòng)公式計算(suàn)對(duì)象的(de)特征向量,即

式中:fo表示對(duì)象的(de)特征向量;fl表示第l個(gè)單點的(de)特征向量;N表示一個(gè)對(duì)象中包含的(de)單點數量。
1.3随機森林(lín)算(suàn)法
随機森林(lín)算(suàn)法由Breiman于2001年提出。該算(suàn)法的(de)基本思想是用(yòng)随機的(de)方式建立一個(gè)森林(lín),森林(lín)中含有很多(duō)決策樹,每一棵樹都是二叉樹的(de)形式。在生成森林(lín)之後,當輸入新的(de)樣本時(shí),每棵決策樹便會對(duì)其進行判斷,然後根據所有的(de)判斷結果選出票(piào)數最多(duō)的(de)作爲最終的(de)分(fēn)類結果。
針對(duì)待處理(lǐ)的(de)點雲數據,首先選取了(le)4個(gè)類别(建築物(wù)屋頂、地面、植被和(hé)建築物(wù)立面)的(de)少量樣本數據,然後選取20%的(de)樣本作爲訓練數據,剩餘的(de)樣本作爲測試數據。
這(zhè)裏将将點雲特征構成的(de)10維特征向量直接輸入到随機森林(lín)分(fēn)類器中,在訓練分(fēn)類器之後,利用(yòng)測試數據評價分(fēn)類正确率。由于對(duì)象的(de)數量對(duì)分(fēn)類結果有較大(dà)影(yǐng)響,因此本文測試了(le)不同對(duì)象數量的(de)分(fēn)類效果,然後選擇效果較好的(de)分(fēn)類器對(duì)所有待處理(lǐ)點雲(即總體數據)進行分(fēn)類。
1.4後處理(lǐ)優化(huà)
初始分(fēn)類結果中不可(kě)避免地存在錯誤分(fēn)類,因此進一步利用(yòng)上下(xià)文關系對(duì)初始分(fēn)類結果進行優化(huà)。
首先,對(duì)分(fēn)類結果進行聯通(tōng)分(fēn)析,将具有鄰接關系的(de)同類點雲聚成簇;然後,根據上下(xià)文關系對(duì)其進行優化(huà)處理(lǐ),具體包括以下(xià)3個(gè)規則:
①對(duì)于屋頂簇,如果屋頂周圍沒有立面,則認爲該屋頂是錯分(fēn)的(de),根據其鄰域中所占比例最高(gāo)的(de)類别來(lái)修正其類别;
②對(duì)于地面簇,如果地面的(de)周圍隻有屋頂,則将該地面修正爲屋頂;
③對(duì)于立面簇,如果立面周圍沒有屋頂,則該立面是錯分(fēn)的(de),根據其鄰域中所占比例最高(gāo)的(de)類别來(lái)修正其類别。
版權聲明(míng):文章(zhāng)來(lái)源于網絡,登載此文出于傳遞更多(duō)信息之目的(de),版權歸原作者及刊載媒體所有,如本文中圖片或文字侵犯您的(de)權益,請聯系我們。
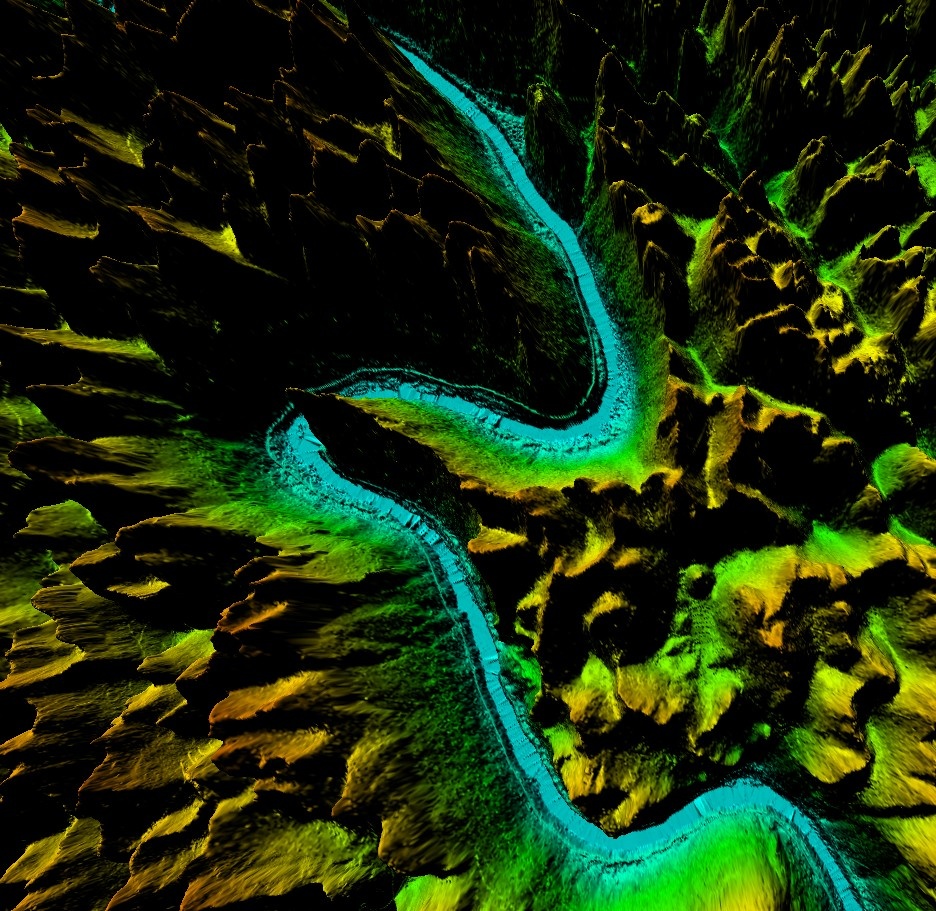
機載LiDAR可(kě)快(kuài)速獲取高(gāo)精度、高(gāo)密度的(de)地表三維坐(zuò)标信息數據。這(zhè)些數據是一系列空間分(fēn)布不均勻的(de)離散點雲數據,如何對(duì)這(zhè)些數據進行濾波是當前國内外研究的(de)熱(rè)點,現有濾波算(suàn)法大(dà)多(duō)都是基于...

近日,湖北(běi)省經信廳發布《2022年度湖北(běi)省創新産品應用(yòng)示範推薦目錄》(以下(xià)簡稱《目錄...
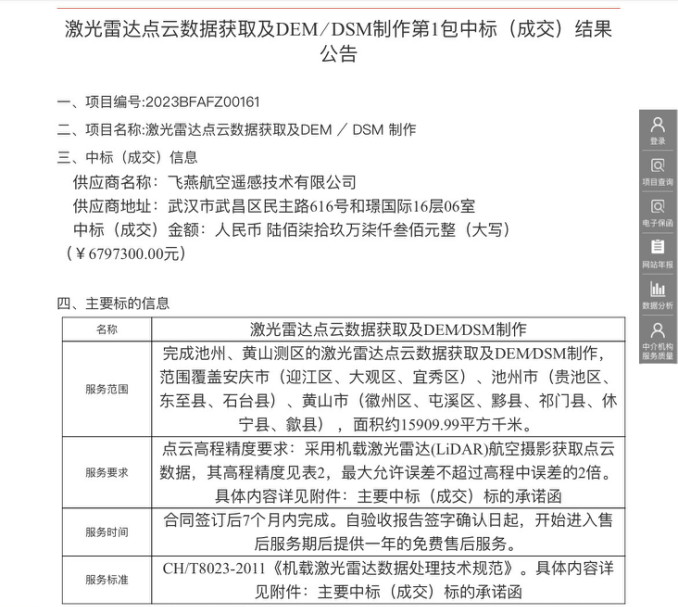
近日,飛(fēi)燕遙感喜中2023年安徽省機載激光(guāng)雷達點雲項目,中标金額6,797,300元。 此次...
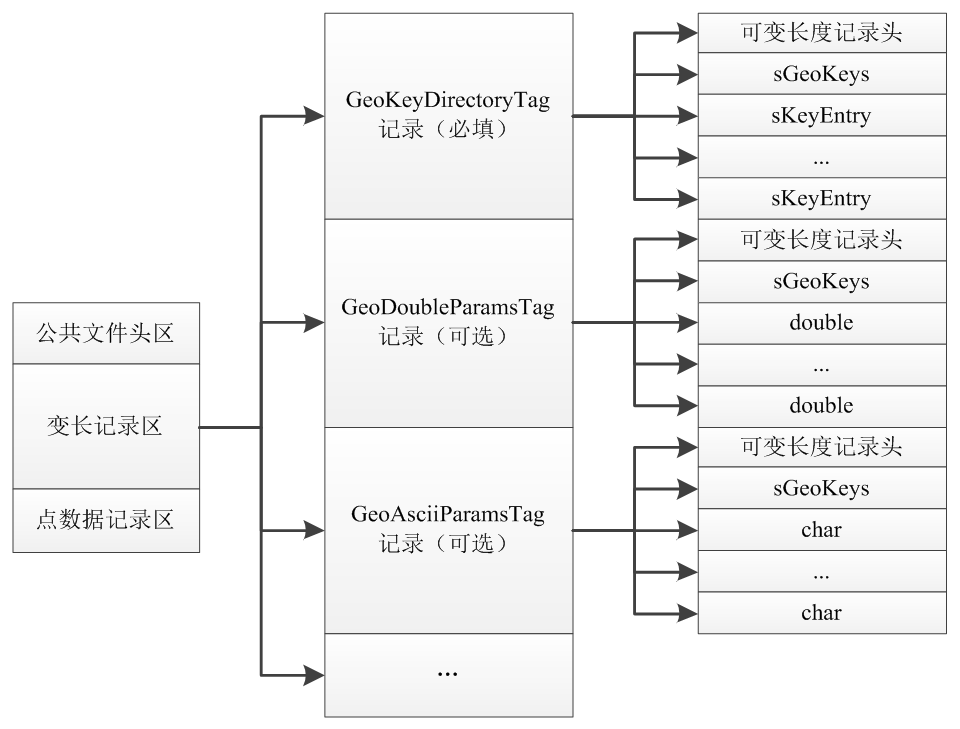
LAS 1.2是目前機載LiDAR中用(yòng)的(de)最多(duō)的(de)點雲文件格式之一。一個(gè)符合LAS 1.2 标準的(de)LIDAR ...
機載LiDAR技術是激光(guāng)測距技術、高(gāo)精度動态載體姿态測量技術和(hé)高(gāo)精度動态GPS差分(fēn)定位技...
目前地形數據獲取主要有三種方式:現場(chǎng)實測、三維正射影(yǐng)像轉數字高(gāo)程模型DEM、激光(guāng)三維...
電話(huà):025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南(nán)京市玄武區(qū)紅山街(jiē)道領智路56
号星河(hé)World産業園3号樓北(běi)8樓

微信公衆号

總經理(lǐ)微信
版權所有:廣東中科遙感技術有限公司 © 2019 備案号:  鄂公網安備:420106020021194号
鄂公網安備:420106020021194号  簡體中文/English
簡體中文/English