作爲一名測繪小白
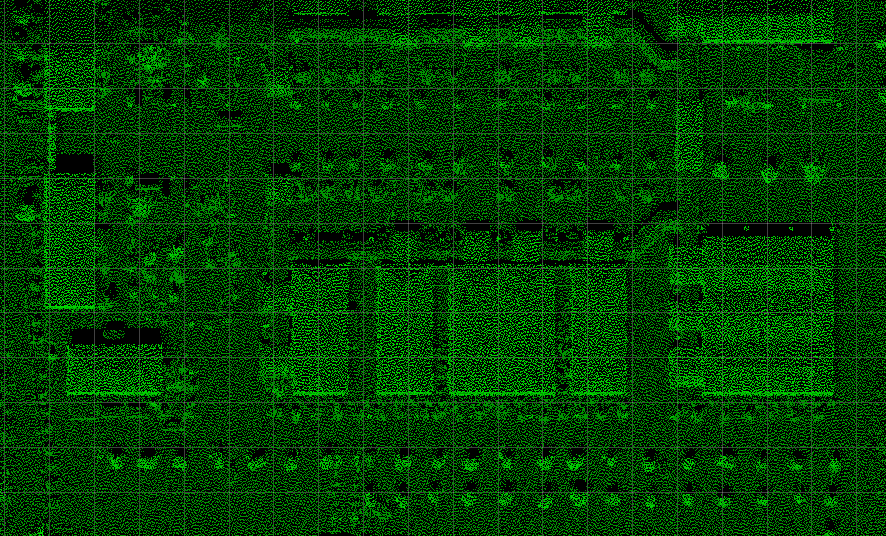
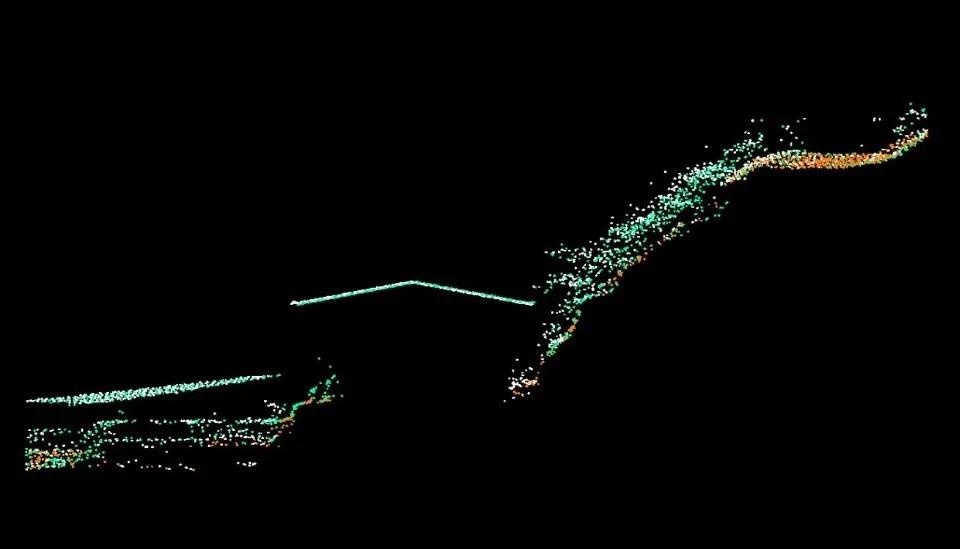
看到眼前這(zhè)些密密麻麻的(de)點
是否讓你感到眼前一黑(hēi)?
你能獲取哪些有用(yòng)的(de)測繪信息呢(ne)?
這(zhè)些點可(kě)大(dà)有來(lái)頭,用(yòng)處可(kě)大(dà)了(le)!
且聽(tīng)筆者詳細道來(lái)吧~
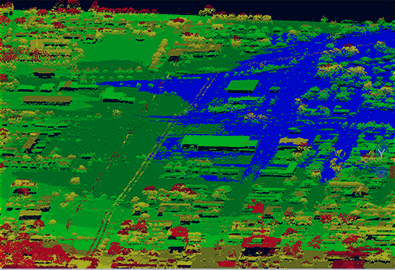
原來(lái),這(zhè)些都是激光(guāng)雷達(LiDAR)點雲數據,每一個(gè)點都包含了(le)三維坐(zuò)标信息,也(yě)是我們常說的(de)X、Y、Z三個(gè)元素,有時(shí)還(hái)包含顔色信息、反射強度信息、回波次數信息等。
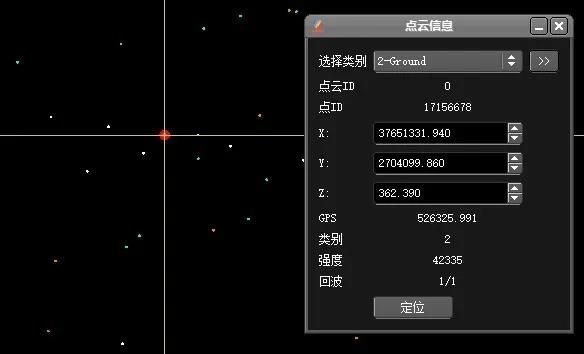
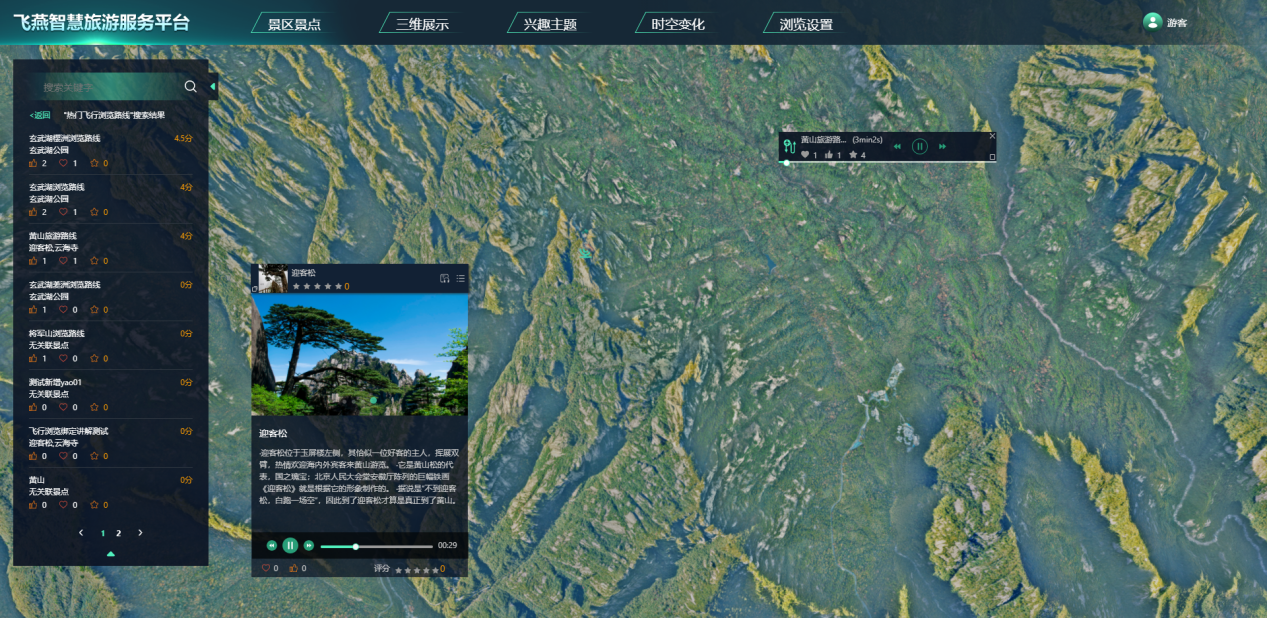
▲ 點雲信息查詢
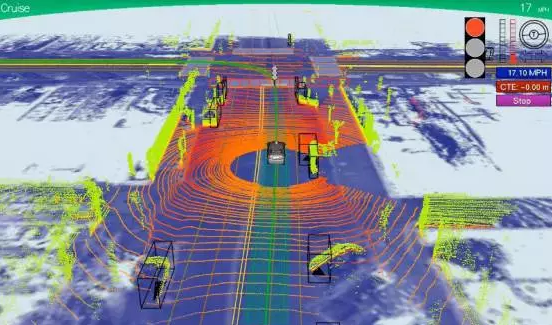
其實,這(zhè)些點是機載激光(guāng)雷達向地面發射激光(guāng)信号,然後收集地面反射的(de)激光(guāng)信号而來(lái)的(de)。此後,業内通(tōng)過聯合解算(suàn)、偏差校正,便可(kě)以計算(suàn)出這(zhè)些點的(de)準确空間信息。看上去一個(gè)簡單的(de)數據獲取,其實包含了(le)較爲複雜(zá)的(de)設備結構及數據采集過程。
▲ 機載激光(guāng)雷達數據獲取
其一,激光(guāng)雷達(LiDAR)包括了(le)激光(guāng)測距系統、光(guāng)學機械掃描單元、控制記錄單元、全球定位系統(Global Position System,GPS)、慣性測量系統(Intertial Measuremet Unit,IMU)以及一套成像設備等。其二,機載激光(guāng)雷達(LiDAR)進行采集點雲數據時(shí)除了(le)天氣需要滿足飛(fēi)行條件外,還(hái)需要獲得(de)空域許可(kě),提前設計航線,實地勘察。
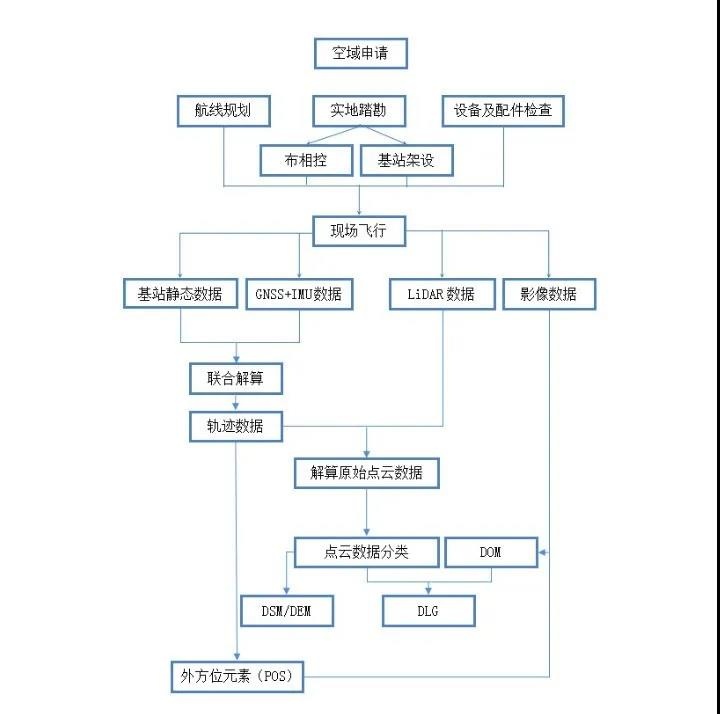
▲ 點雲數據獲取及解算(suàn)過程
我們在上文所見的(de)那些離散點無法獲取有用(yòng)信息,是因爲打開的(de)方式不對(duì)。
正确的(de)打開方式是這(zhè)樣的(de):
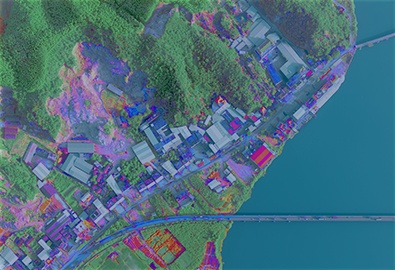
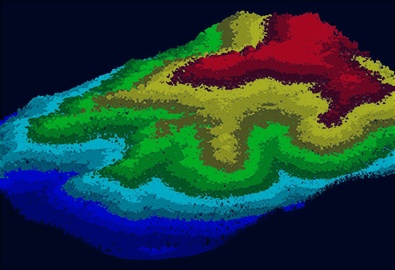
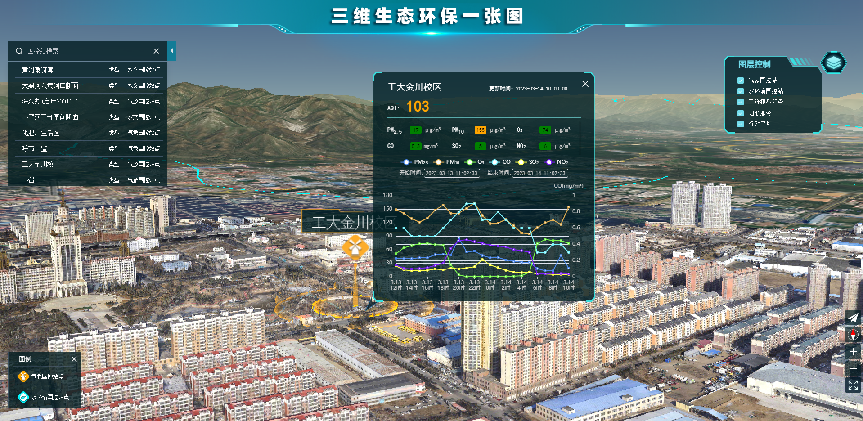
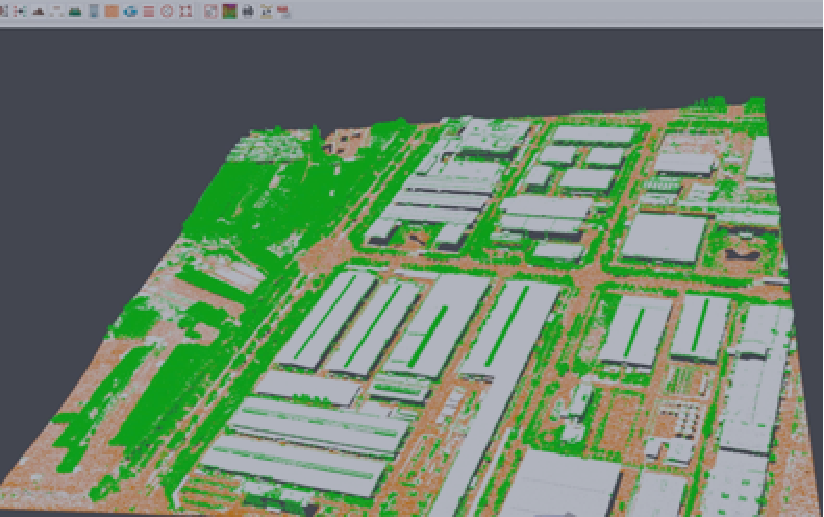
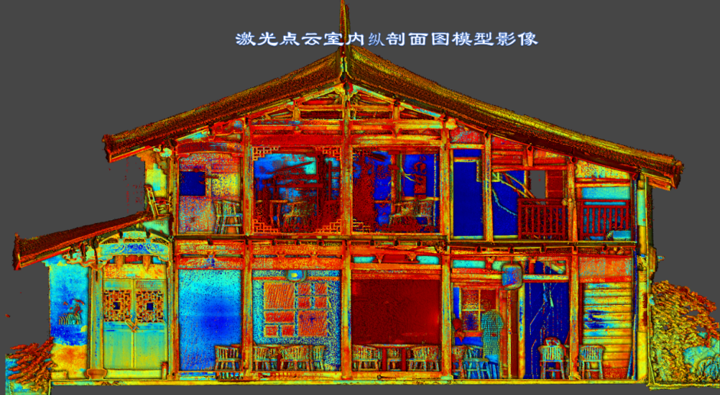
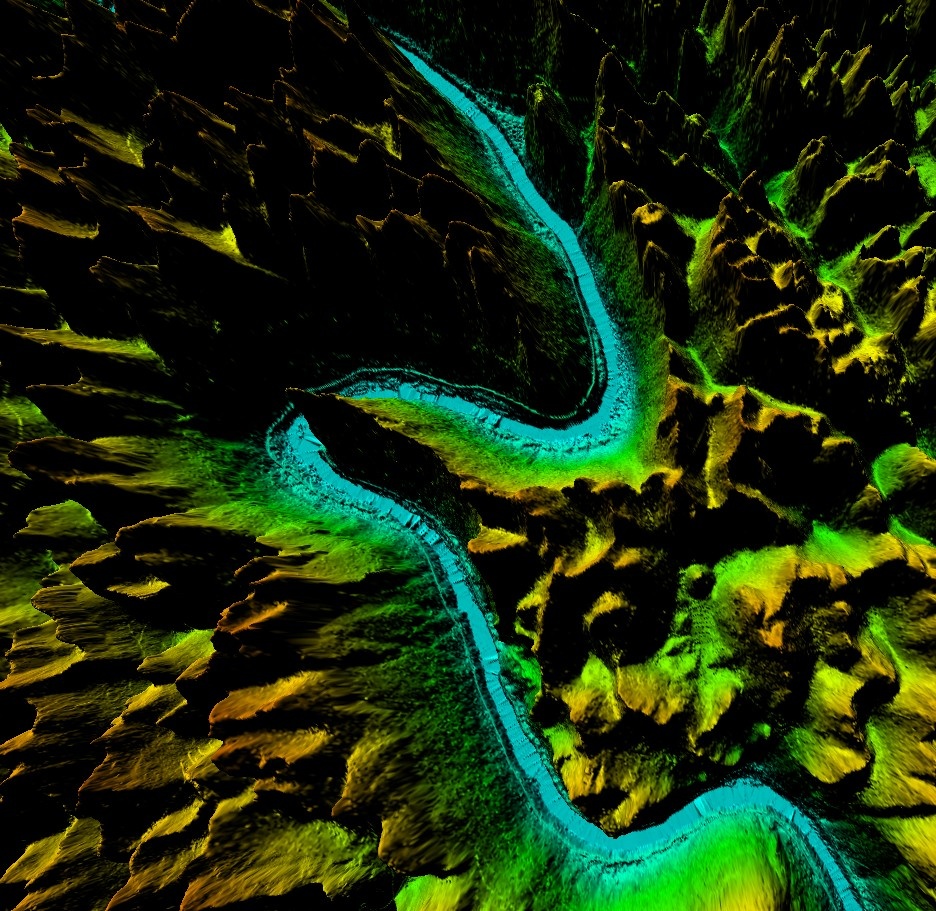
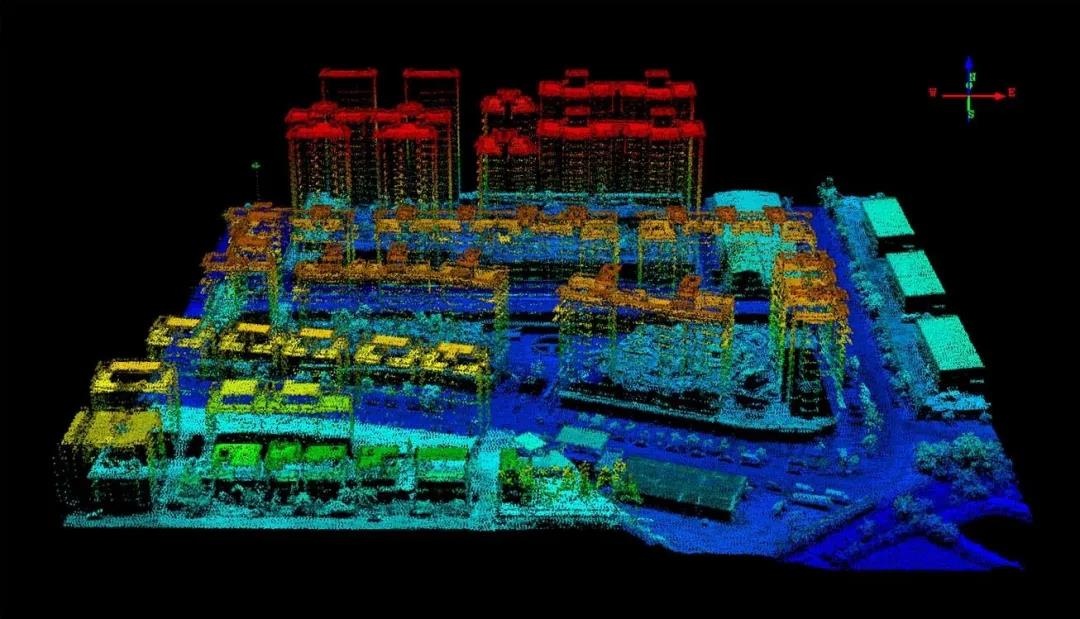
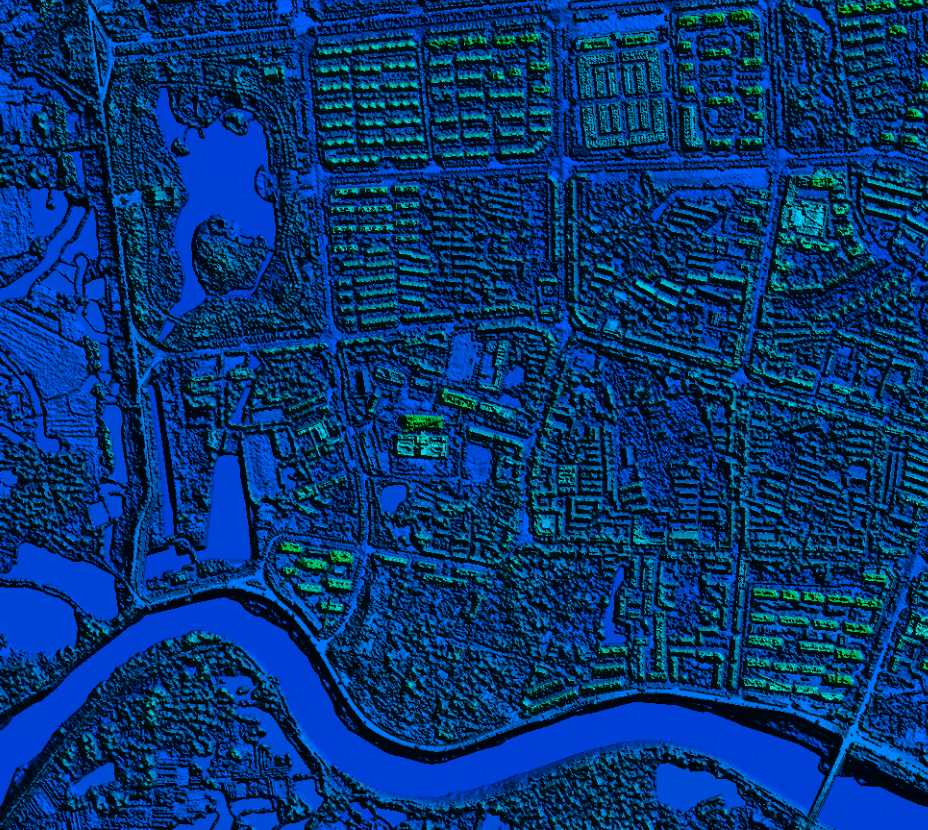
▲ 點雲三維預覽
三維預覽,隻是點雲最基本的(de)表面特征,因爲每一個(gè)點雲都具備空間坐(zuò)标信息,因此它們都具備測量能力。兩點成線,三點成面,四點成體,通(tōng)過這(zhè)些點,不僅可(kě)以明(míng)确了(le)解地表空間上的(de)某個(gè)點的(de)坐(zuò)标信息,還(hái)可(kě)以計算(suàn)它們之間的(de)長(cháng)度、面積、體積、角度等信息,正好應對(duì)了(le)測量需要的(de)要素。
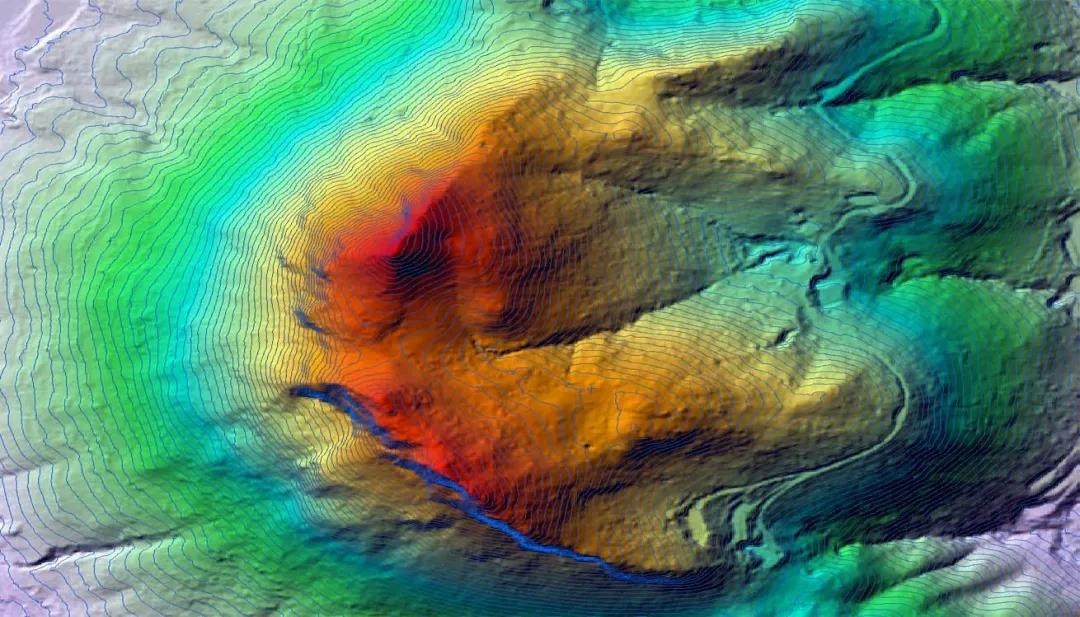
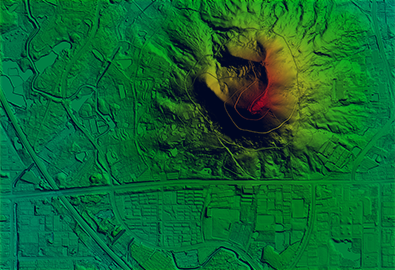
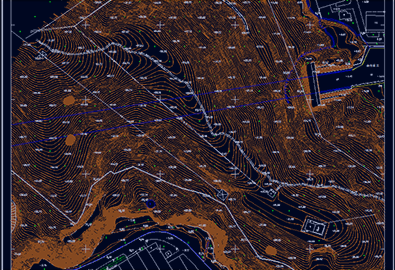
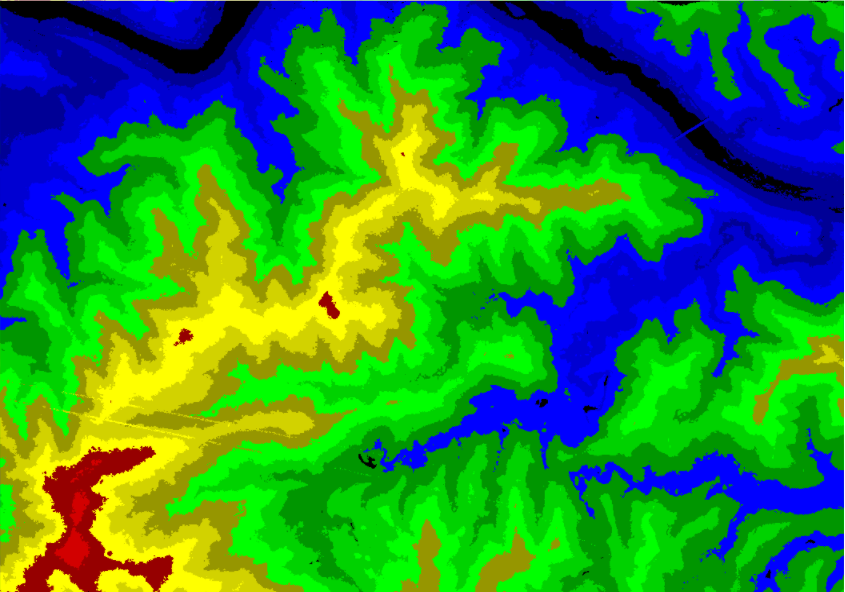
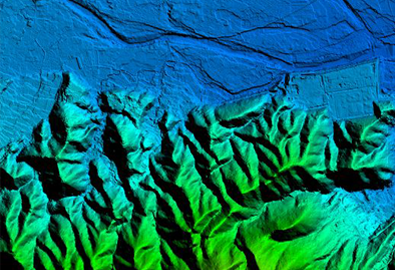
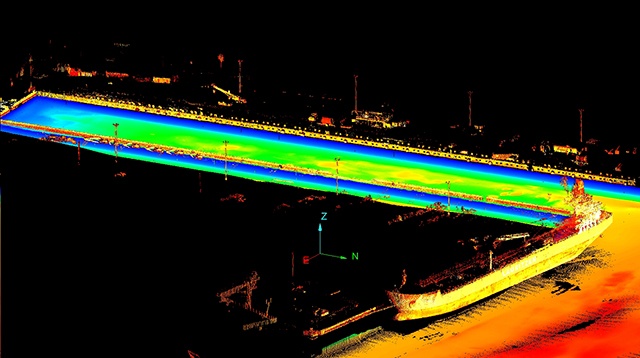
通(tōng)過對(duì)點雲數據進行自動化(huà)預處理(lǐ),地面濾波,結合人(rén)工編輯對(duì)激光(guāng)點雲進行進一步的(de)精分(fēn)類,保留地面點,剩餘的(de)地面點通(tōng)過構建不規則三角網(TIN)等模型進行栅格化(huà),可(kě)得(de)到高(gāo)精度的(de)數字高(gāo)程模型(DEM)數據,也(yě)可(kě)以轉換爲等高(gāo)線數據。
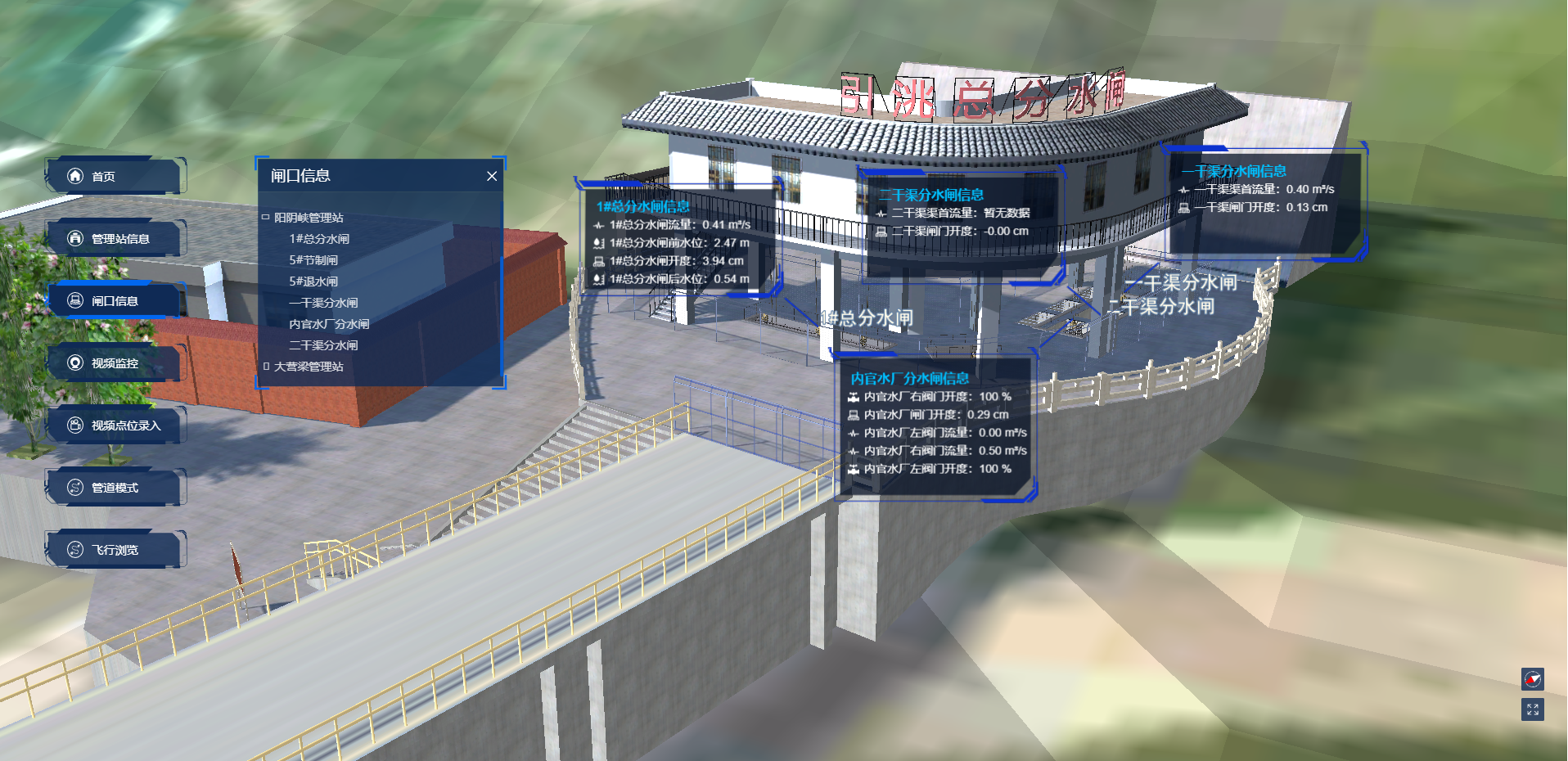
可(kě)用(yòng)于三維建模
随著(zhe)激光(guāng)雷達技術的(de)逐步成熟,三維激光(guāng)雷達技術制作的(de)三維模型精度高(gāo),适用(yòng)範圍廣,外業工作量少,省時(shí)省力。在建築物(wù)的(de)房(fáng)屋輪廓提取、特征點檢測和(hé)三維重建工作上發揮了(le)重要作用(yòng)。且結合傾斜攝影(yǐng)技術,地物(wù)提取更加便捷,數據可(kě)視化(huà)程度更高(gāo)。
可(kě)用(yòng)于農林(lín)普查
機載激光(guāng)點雲可(kě)以用(yòng)于普查林(lín)木(mù)的(de)特征,例如樹木(mù)的(de)平均高(gāo)度、樹冠密度、生物(wù)量、林(lín)木(mù)儲量和(hé)植被覆蓋度。如果搭配高(gāo)光(guāng)譜成像儀,可(kě)以确定更多(duō)的(de)信息,如植被分(fēn)類、植被儲量、土壤變化(huà)等。其次,衍生數據可(kě)用(yòng)于監測森林(lín)生長(cháng)、風暴或火災造成的(de)損害等。
可(kě)用(yòng)于土方計算(suàn)
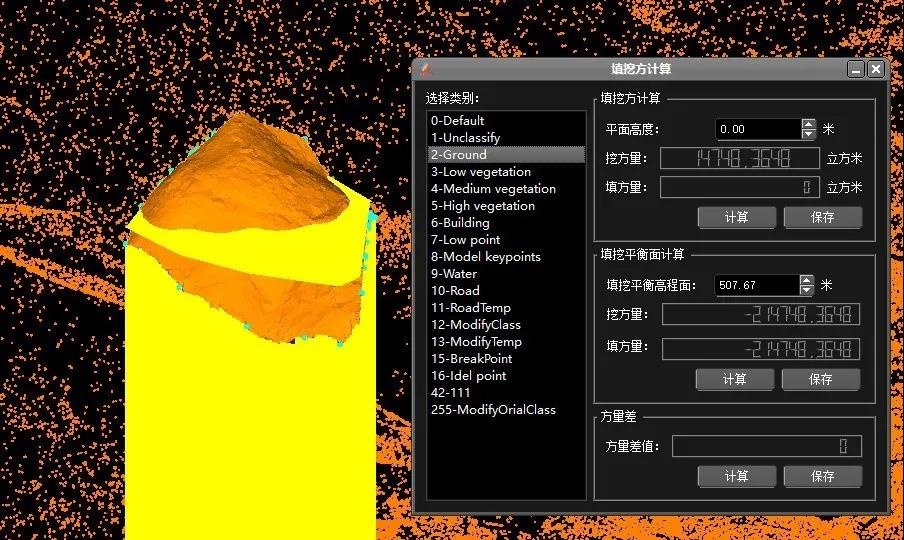
高(gāo)精度激光(guāng)點雲,可(kě)用(yòng)于構建地形三維模型,爲勘察設計提供斷面量測、坡度坡向量測、土方填挖量等信息,大(dà)大(dà)減少工程勘察設計中的(de)外業工作量,縮短工作周期。
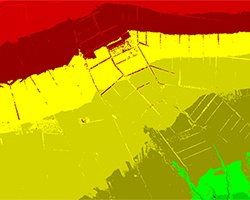
可(kě)用(yòng)于監測地質災害
通(tōng)過地形三維模型的(de)建立,可(kě)以大(dà)面積監測地形的(de)變化(huà),可(kě)以根據地形的(de)變化(huà)方向及地形的(de)變化(huà)量,作出風險評估,爲預防地質災害的(de)發生提供依據。例如,對(duì)滑坡體地表的(de)監測,特别是在陡坡下(xià)的(de)道路、鐵軌,以及削坡建房(fáng)等容易發生滑坡地區(qū),能夠爲滑坡體成因和(hé)發育趨勢的(de)推斷提供重要依據。
上述五個(gè)方面,隻是點雲數據應用(yòng)的(de)其中一部分(fēn)。
因爲激光(guāng)雷達具備著(zhe)以下(xià)幾個(gè)特點:
全天候工作,主動獲取數據;
隐蔽性好,抗有源幹擾能力強,且獲取數據範圍廣;
激光(guāng)穿透能力強;
外業工作量小;
點雲精度高(gāo),空間坐(zuò)标信息準确;
所以,激光(guāng)雷達(LiDAR)獲取的(de)點雲數據,往往也(yě)适用(yòng)資源勘探、城(chéng)市規劃、農業開發、水(shuǐ)利工程、環境監測、礦山測量、隧道測量、公路道路測量、電纜監測、海洋深水(shuǐ)測量等各個(gè)方面。
今天的(de)激光(guāng)雷達(LiDAR)點雲數據就介紹到這(zhè)裏啦,你有沒有get到呢(ne)?

過去,森林(lín)資源調查以人(rén)工地面調查爲主,不僅耗時(shí)久、效率低,數據精度也(yě)不高(gāo)。現在,一架搭載機載激光(guāng)雷達的(de)小型飛(fēi)機,飛(fēi)行1個(gè)小時(shí)可(kě)采集300平方公裏的(de)森林(lín)數據。高(gāo)效率的(de)技術手段使...
2021年,飛(fēi)燕遙感憑借豐富的(de)航攝經驗與百人(rén)數據處理(lǐ)團隊,承接了(le)安徽省基礎地理(lǐ)信息數...
機載LiDAR可(kě)快(kuài)速獲取高(gāo)精度、高(gāo)密度的(de)地表三維坐(zuò)标信息數據。這(zhè)些數據是一系列空間分(fēn)布...
LIDAR點雲數據的(de)數據組織方式,提出了(le)采用(yòng)矩形規則格網形式來(lái)表達LIDAR點雲數據,将LIDA...
近日,飛(fēi)燕遙感公司喜中2019年廣西森林(lín)資源規劃設計調查機載激光(guāng)雷達數據獲取及處理(lǐ)項目...

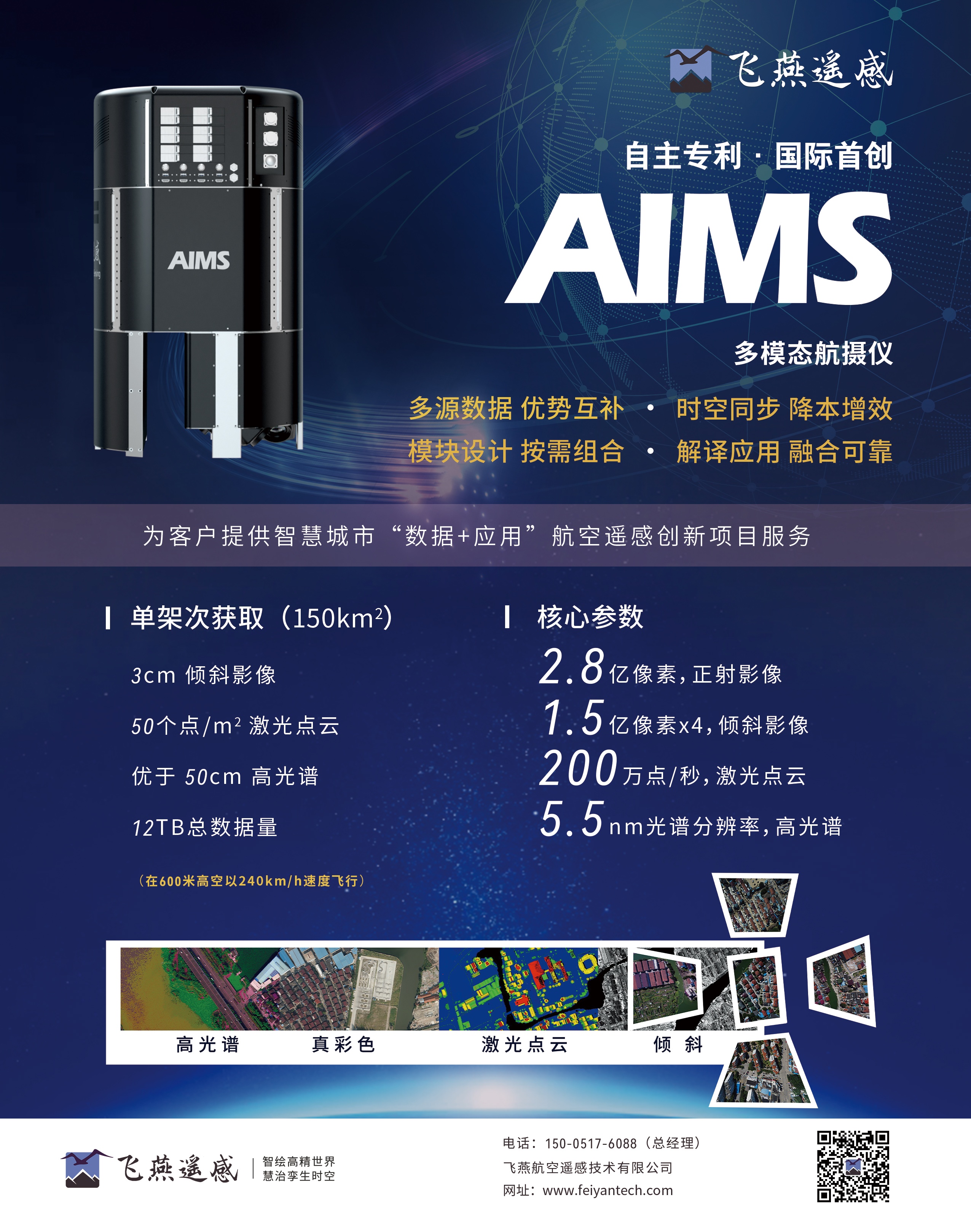
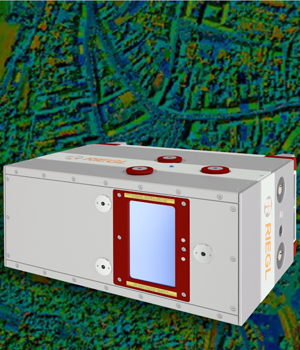
飛(fēi)燕緊随地信産業發展脈搏,近日又引進一台國際上最先進的(de) RIEGL VQ-1560i 機載激光(guāng)雷達...
電話(huà):025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南(nán)京市玄武區(qū)紅山街(jiē)道領智路56
号星河(hé)World産業園3号樓北(běi)8樓

微信公衆号

總經理(lǐ)微信
版權所有:廣東中科遙感技術有限公司 © 2019 備案号:  鄂公網安備:420106020021194号
鄂公網安備:420106020021194号  簡體中文/English
簡體中文/English