無人(rén)機航攝系統,也(yě)稱爲低空無人(rén)機系統UAV航攝系統,包括飛(fēi)行平台、航線設計和(hé)飛(fēi)行控制系統、GPS實時(shí)動态差分(fēn)系統和(hé)數據後處理(lǐ)系統。
在本次試驗中,采用(yòng)的(de)可(kě)拆卸手抛式無人(rén)機爲傳統前置螺旋槳驅動,機身爲EPO泡沫,尺寸爲163cm*120cm,全重僅2.7kg,便于發射和(hé)回收。

分(fēn)析兩個(gè)試驗區(qū)的(de)特點,在試驗區(qū)一,因爲地勢開闊,因此采取“之”字形航線設計;在試驗區(qū)二,因地形複雜(zá),區(qū)域内有高(gāo)層建築,因此采取“井”字形的(de)航線設計,航線設計的(de)航向重疊度爲30%,旁向重疊度爲80%。在航線設計時(shí),對(duì)地形進行粗略匹配,從而可(kě)以提高(gāo)飛(fēi)行效率。
在航線設計好之後,通(tōng)過飛(fēi)行器電台,将航線上傳至飛(fēi)控系統。飛(fēi)控系統包括機載自控系統和(hé)地面遙控系統兩部分(fēn)。在将航線上傳之後,由自控系統根據航線對(duì)飛(fēi)機飛(fēi)行姿态進行控制,同時(shí)通(tōng)過飛(fēi)行器電台,将實時(shí)飛(fēi)行數據傳輸給地面控制平台。地面遙控系統可(kě)以在自控系統出現問題時(shí),實時(shí)對(duì)飛(fēi)機的(de)飛(fēi)行進行控制,從而保證飛(fēi)行的(de)安全性。
該系統采用(yòng)GPS實時(shí)差分(fēn)技術。除在航飛(fēi)區(qū)域附近架設GPS基站之外,在飛(fēi)機上同時(shí)裝有GPS接收裝置,通(tōng)過電台進行通(tōng)信。利用(yòng)GPS數據差分(fēn)處理(lǐ)器,利用(yòng)機載和(hé)架設的(de)GPS信息,能夠實時(shí)聯合結算(suàn)出無人(rén)機的(de)空間坐(zuò)标位置和(hé)飛(fēi)行姿态等數據參數。相對(duì)于傳統PPK後差分(fēn)系統,能夠實時(shí)監控飛(fēi)行和(hé)航片質量,提高(gāo)生産效率和(hé)數據精度。
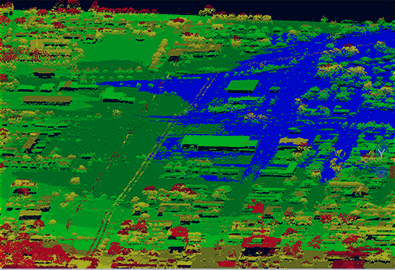
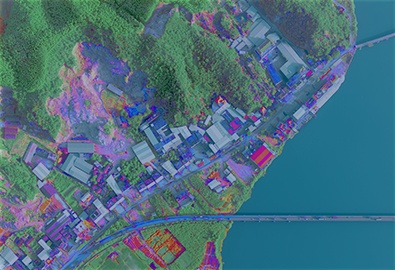
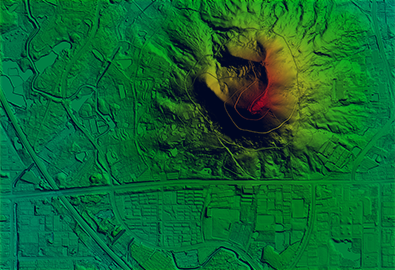
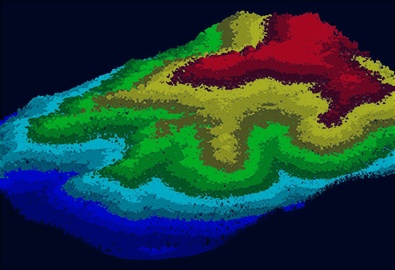
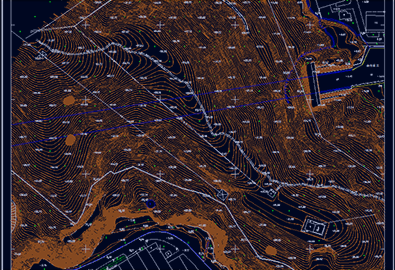
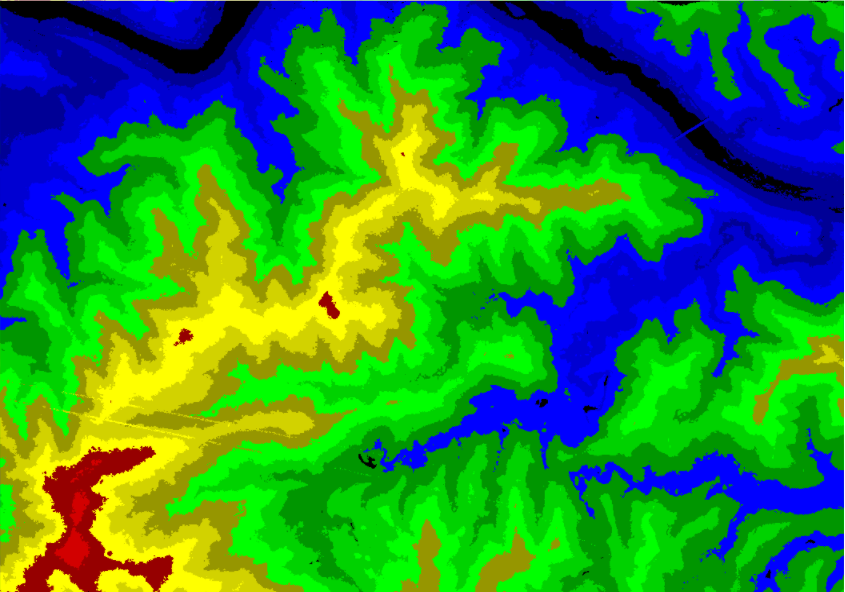
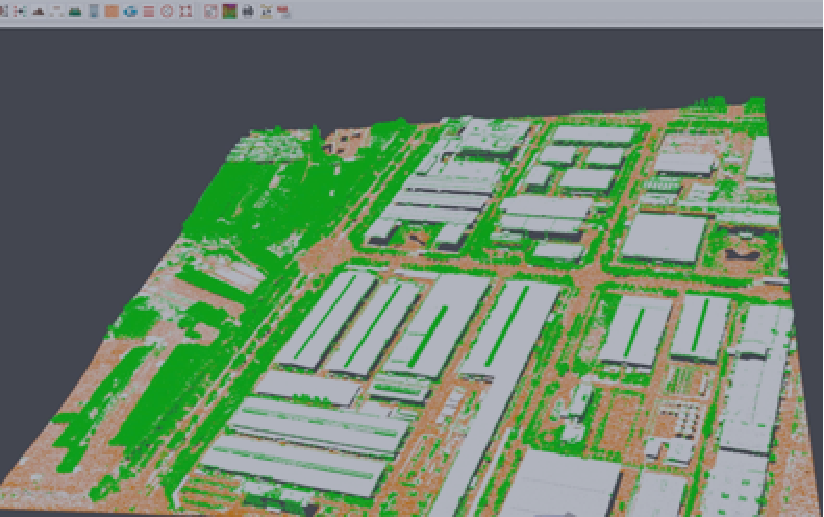
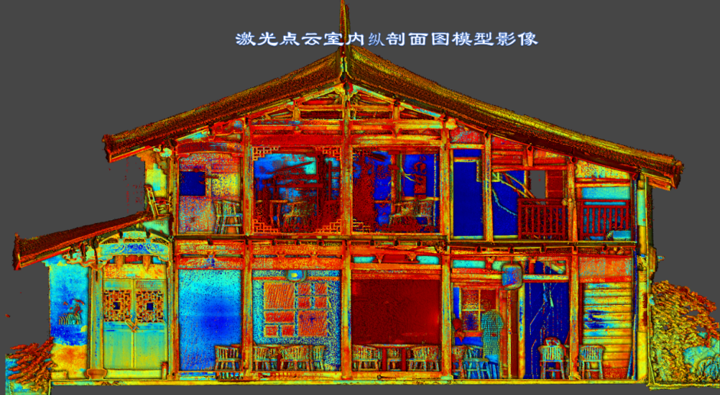
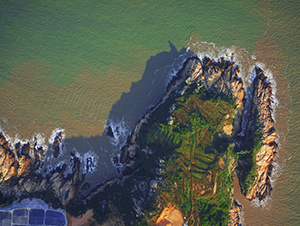
數據後處理(lǐ)采用(yòng)俄羅斯Agisoft公司的(de)Photoscan Professional軟件,無需設置初始值,無需相機校準,利用(yòng)多(duō)視圖三維重建技術能夠生成高(gāo)分(fēn)辨率的(de)正射影(yǐng)像和(hé)DEM模型。
今年6月(yuè)25日,是第34個(gè)全國土地日,自然資源系統用(yòng)一系列缤紛多(duō)彩的(de)活動,向全社會發出了(le)“節約集約用(yòng)地 嚴守耕地紅線”的(de)最強音(yīn),呼籲我們共同珍惜每一寸土地、保護每一寸耕地。2024...

借助無人(rén)機的(de)高(gāo)效性、靈活性和(hé)多(duō)功能性,無人(rén)機在海洋生态研究和(hé)保護中具有重要的(de)應用(yòng)...

新質生産力、新型消費、新型能源體系……2024年政府工作報告提出的(de)一系列“新”引人(rén)關...

飛(fēi)燕遙感作爲“香山工匠(jiàng)杯”無人(rén)機測繪操控員(yuán)(實景三維建設)項目競賽技術支持單位,...

自無人(rén)機航攝引入測繪領域以來(lái),憑借其機動靈活、高(gāo)效快(kuài)速、精細準确、成本低等特點,...

針對(duì)城(chéng)市違法用(yòng)地和(hé)違章(zhāng)建築現象,結合廈門市“兩違”遙感監測工作,飛(fēi)燕遙感設計了(le)一...
電話(huà):025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南(nán)京市玄武區(qū)紅山街(jiē)道領智路56
号星河(hé)World産業園3号樓北(běi)8樓

微信公衆号

總經理(lǐ)微信
版權所有:廣東中科遙感技術有限公司 © 2019 備案号:  鄂公網安備:420106020021194号
鄂公網安備:420106020021194号  簡體中文/English
簡體中文/English