什(shén)麽是攝影(yǐng)測量?
攝影(yǐng)測量學是一門利用(yòng)光(guāng)學像片研究被攝物(wù)體的(de)形狀、位置、大(dà)小、特性及相互位置關系的(de)學科。簡而言之,就是一攝影(yǐng)爲工具,以測量爲目的(de)。
如果我們用(yòng)拼圖來(lái)拼湊攝影(yǐng)測量的(de)理(lǐ)論基礎,我們會發現攝影(yǐng)與測量是這(zhè)樣相親相愛(ài)的(de)?
透視變換的(de)幾何原理(lǐ)
攝影(yǐng)測量理(lǐ)論基礎拼圖的(de)第一個(gè)闆塊是透視變換的(de)幾何原理(lǐ)。離開透視變換,就無法計算(suàn)相片中物(wù)體的(de)形狀位置信息。
也(yě)就是說,如果沒有透視變換,就算(suàn)你拍(pāi)出的(de)照(zhào)片再精美(měi),也(yě)無法從照(zhào)片測量出什(shén)麽有用(yòng)信息
有了(le)透視變換,我們才能在二維的(de)紙張/照(zhào)片上,展現出物(wù)體的(de)三維特征。
測量1.jpeg")
幾何透視變換
文藝複興初期的(de)意大(dà)利建築師布魯内萊斯基(Brunelleschi,1377-1446),真正建立了(le)幾何意義上的(de)透視法。他(tā)啓發了(le)同時(shí)代的(de)畫(huà)家。馬薩喬(Masaccio,1401-1428),是第一個(gè)運用(yòng)透視法的(de)畫(huà)家。
測量2.jpeg")
透視窗(chuāng)。從左到右分(fēn)别是:模特、透視窗(chuāng)、對(duì)著(zhe)透視窗(chuāng)臨摹的(de)畫(huà)家
十九世紀中葉,法國測量學家和(hé)攝影(yǐng)測量學的(de)先驅Fourcade首先發現了(le)用(yòng)立體照(zhào)片可(kě)重建立體視覺,從而促進了(le)攝影(yǐng)測量的(de)誕生。此處高(gāo)亮“雙目視覺”的(de)概念。
成像設備
幾何透視變換和(hé)雙目視覺理(lǐ)論的(de)發展爲攝影(yǐng)和(hé)測量牽上了(le)線,然而要想共乘友誼之舟不翻船,需要一個(gè)重要的(de)工具:
相機?不,用(yòng)我們學術期刊的(de)專業術語,叫,成像設備。
19世紀早期,德國教授舒爾茲發現銀的(de)混合物(wù)在日光(guāng)下(xià)會變黑(hēi)。1839年,法國畫(huà)家達蓋爾發明(míng)了(le)銀版攝影(yǐng)法,并制作了(le)世界上第一台真正的(de)照(zhào)相機。
1969年,貝爾實驗室的(de)博伊爾和(hé)史密斯發明(míng)了(le)一種稱作爲電荷耦合器件(charge coupled device,CCD)的(de)元件,這(zhè)是一種高(gāo)感光(guāng)度的(de)半導體單晶材料。
看到這(zhè)裏,相信無數老法師小夥伴已經露出了(le)欣慰或心酸的(de)微笑(xiào),膠片/數碼相機的(de)出現,讓許多(duō)人(rén)在“單反窮三代”和(hé)“毒、德味、大(dà)師、學習(xí)了(le)”的(de)大(dà)坑中越陷越深,也(yě)讓攝影(yǐng)測量有了(le)最關鍵的(de)工具。
測量3.jpeg")
哈蘇數碼相機
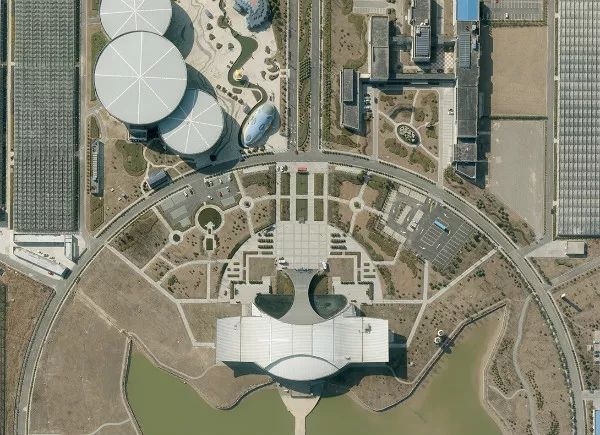
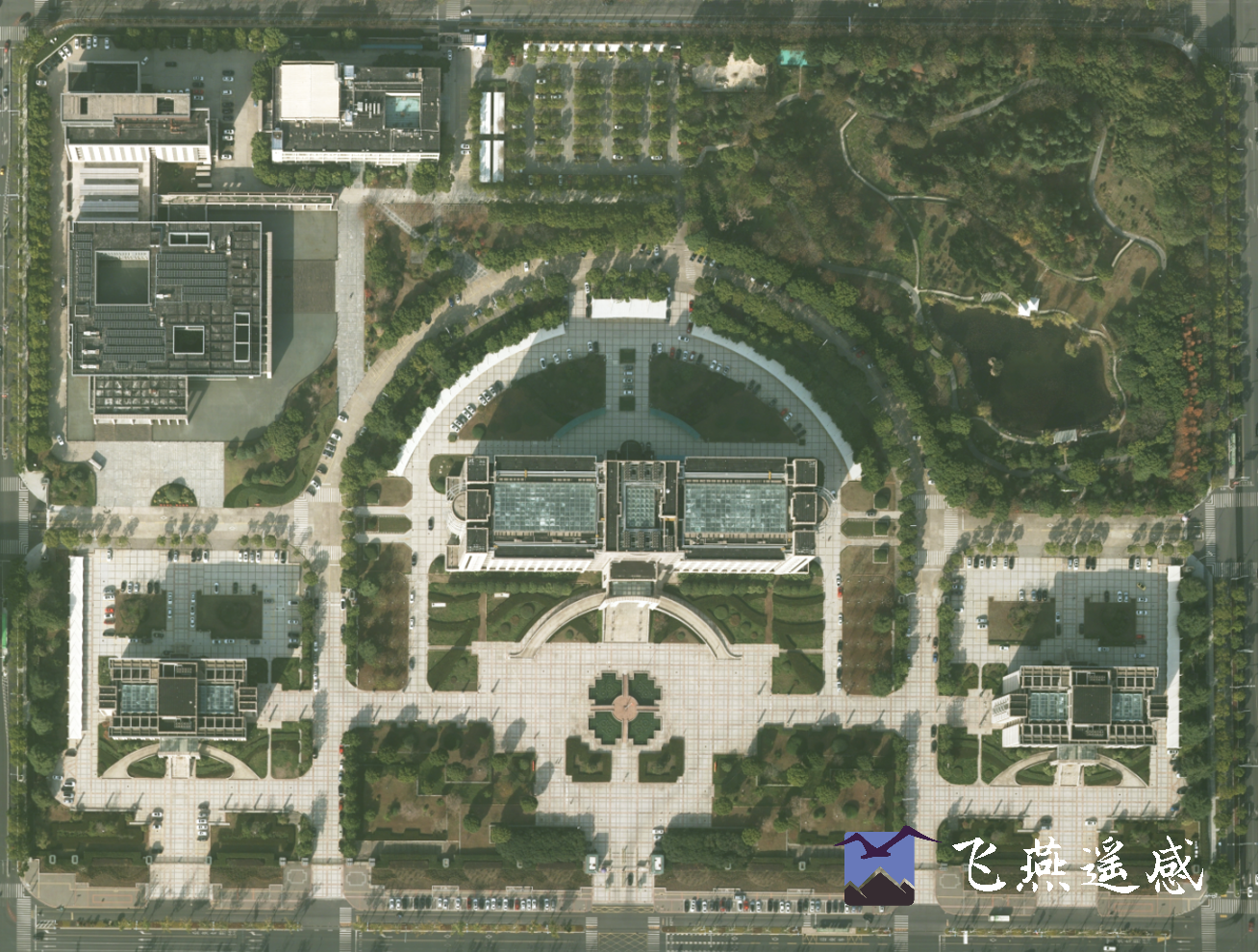
在其後漫長(cháng)的(de)歲月(yuè)裏,相機和(hé)照(zhào)片幫助人(rén)們将野外測量工作搬運至室内。”内業“工作成爲主體,照(zhào)片替代了(le)三腳架、經緯儀和(hé)标尺,成了(le)主要的(de)研究對(duì)象。
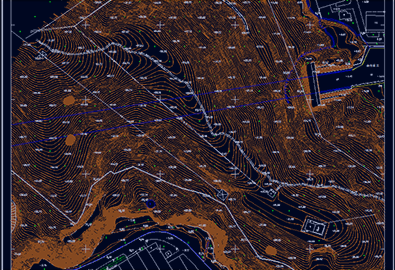
傳統測繪地形圖 -------> 航片
測量4.jpeg")
測量5.jpeg")
載 體
攝影(yǐng)測量的(de)第3個(gè)闆塊是載體。狹義上的(de)攝影(yǐng)測量一般指航空攝影(yǐng)測量,成熟的(de)飛(fēi)行平台是重要的(de)組成部分(fēn)。
18世紀,西方的(de)孟格菲兄弟(dì)重新發明(míng)熱(rè)氣球,并于1783年第一次載人(rén)航行。
一年後,法國的(de)羅伯特兄弟(dì)乘坐(zuò)氫氣球飛(fēi)上天空。
1858年,法國攝影(yǐng)師納達爾乘坐(zuò)氣球拍(pāi)攝了(le)世界上第一張航空影(yǐng)像。
1903年,萊特兄弟(dì)駕駛自制的(de)世界上第一架飛(fēi)機上了(le)天。
以航天飛(fēi)行器爲載體的(de)攝影(yǐng)測量應運而生。第一次世界大(dà)戰中,首台航攝儀問世、立體坐(zuò)标量測儀和(hé)1318立體測圖儀投入使用(yòng)。
測量6.jpeg")
1957年,第一顆衛星被發射到外太空,同時(shí)開啓了(le)衛星攝影(yǐng)測量時(shí)代。
2000年前後,各國陸續開始深空探測項目,雖然沒有“深空攝影(yǐng)測量”的(de)明(míng)确說法,攝影(yǐng)測量學者對(duì)基于光(guāng)學的(de)深空探測項目也(yě)貢獻良多(duō)。
測量7.jpeg")
月(yuè)球車玉兔
攝影(yǐng)測量多(duō)樣化(huà)的(de)攝影(yǐng)平台如下(xià)圖所示:
測量8.jpeg")
上排:手持儀器架、地面移動測圖系統、無人(rén)機;
下(xià)排:無人(rén)飛(fēi)艇、國産運12航攝飛(fēi)機、測繪衛星;
中排:嫦娥月(yuè)球探測車
測量法和(hé)測量工具
1795年,年僅18歲的(de)高(gāo)斯發明(míng)了(le)最小二乘法。
1959年,德國的(de)Schmid教授提出光(guāng)束法區(qū)域網平差,這(zhè)是小孔成像的(de)物(wù)理(lǐ)原理(lǐ)與最小二乘的(de)完美(měi)結合。
根據測量工具的(de)演進,将攝影(yǐng)測量的(de)發展區(qū)分(fēn)爲三個(gè)時(shí)代。

各個(gè)時(shí)代的(de)部分(fēn)儀器如下(xià):
測量9.jpeg")
由此我們可(kě)以總結出:
狹義的(de)攝影(yǐng)測量
根據一系列像片,利用(yòng)三角測量獲取像片的(de)位置和(hé)姿态,并交會出所攝物(wù)體的(de)位置和(hé)深度。
攝影(yǐng)測量數學基礎
透視幾何、核線幾何與光(guāng)束法區(qū)域網平差(bundle adjustment)(代表作: 王之卓.攝影(yǐng)測量原理(lǐ),1990)。
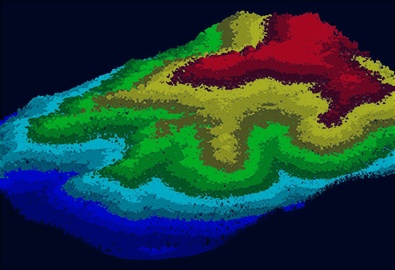
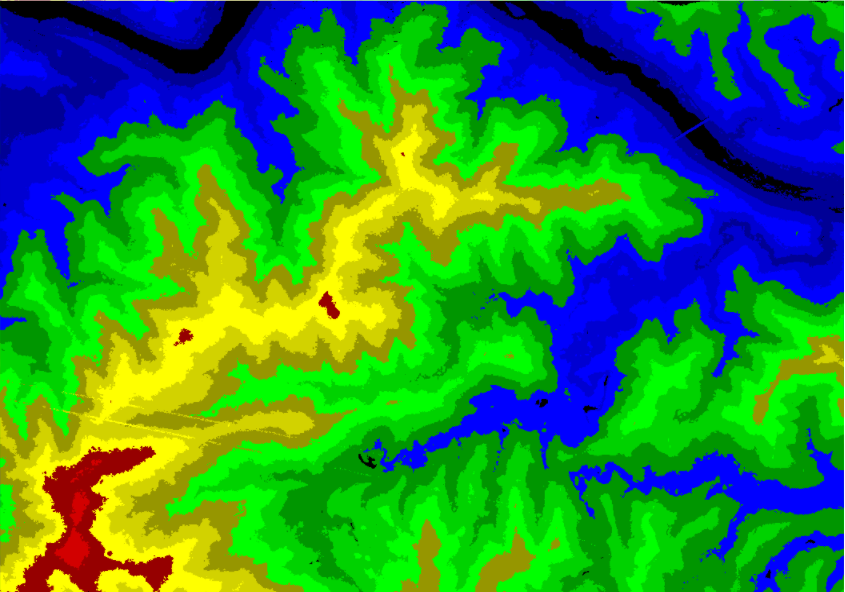
攝影(yǐng)測量産品
DEM、DOM、DRG、DLG、專題圖、各級縮編地圖等等。
測量10.jpeg")
什(shén)麽是計算(suàn)機視覺?
如果說攝影(yǐng)測量學是攝影(yǐng)與測量這(zhè)對(duì)好基友結合的(de)産物(wù),那麽計算(suàn)機視覺和(hé)攝影(yǐng)測量就可(kě)以說是離散多(duō)年的(de)兄弟(dì)了(le)。
兩者在定義、目的(de)、經典算(suàn)法、概念稱呼等都有精妙的(de)類似之處。
計算(suàn)機視覺的(de)定義可(kě)簡單概括爲“用(yòng)計算(suàn)機代替人(rén)眼,從圖片中重建和(hé)解譯世界”。
看看這(zhè)些經典的(de)算(suàn)法和(hé)算(suàn)子:Canny邊緣檢測、Shape from Shading、Hough 變換、LoG(Laplace of Gaussian)等……
再看看計算(suàn)機視覺的(de)數學基礎:透視幾何、核線幾何、多(duō)視幾何、光(guāng)束法平差……
最後看看視覺幾何的(de)應用(yòng) :
測量11.jpeg")
人(rén)對(duì)著(zhe)棋盤網格攝影(yǐng),以檢校相機内參數
測量12.jpeg")
用(yòng)SLAM獲得(de)的(de)半密集的(de)三維map
測量13.jpeg")
采用(yòng)圖割法生成室内模型的(de)深度圖
測量14.jpeg")
汽車三維模型的(de)構建
可(kě)見,僅從視覺中的(de)幾何出發,兩門學科具有相同的(de)理(lǐ)論基礎,差别甚少。而且,技術細節上也(yě)有許多(duō)相近的(de)實例。
20世紀90年代後,攝影(yǐng)測量與計算(suàn)機視覺都得(de)到物(wù)理(lǐ)和(hé)技術領域的(de)強大(dà)推動,兩個(gè)領域的(de)學者們都在處理(lǐ)相似的(de)問題,但也(yě)有細微的(de)區(qū)别。将兩門學科的(de)細微區(qū)别與同源等價之處總結歸納(藍色爲區(qū)别,紫色爲等價)。

計算(suàn)機視覺的(de)經典著作是Marr在1982年發表的(de)《視覺:從計算(suàn)的(de)視角研究人(rén)的(de)視覺信息表達與處理(lǐ)》,詳細分(fēn)析了(le)二維圖像的(de)表達、立體圖像的(de)對(duì)應和(hé)重建、算(suàn)法以及硬件的(de)實現。
如果僅僅隻有這(zhè)些細微的(de)差别,這(zhè)兩門學科早就合而爲一了(le)。兩者間的(de)區(qū)别主要在于數據源和(hé)應用(yòng)。
如果用(yòng)表格來(lái)表示,兩者應用(yòng)之間的(de)區(qū)别爲:
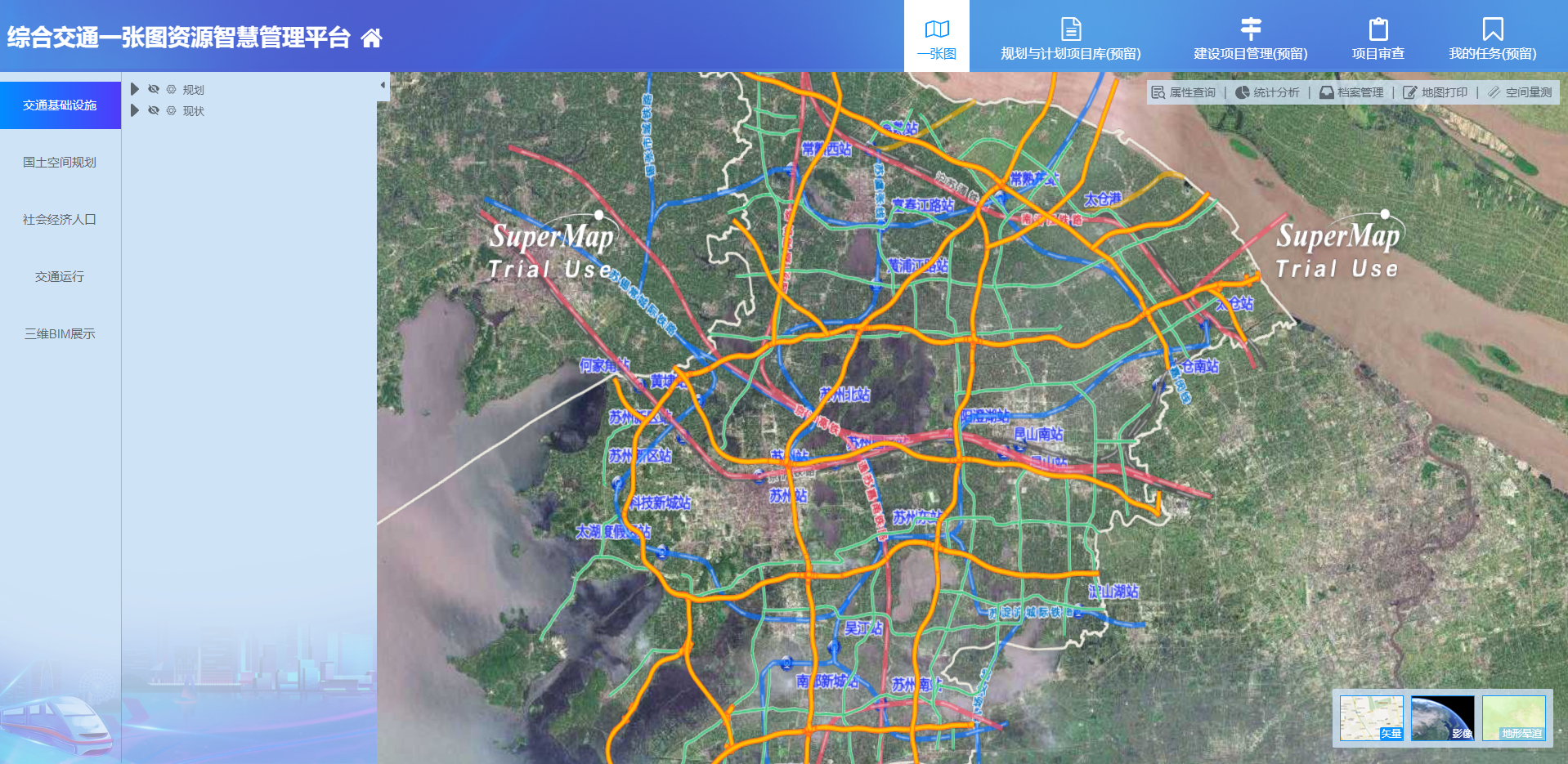
攝影(yǐng)測量中以地面移動測量系統(mobile mapping system, MMS)采集道路和(hé)街(jiē)景;而計算(suàn)機視覺同樣關注道路信息(以及室内場(chǎng)景)的(de)提取與重建,并應用(yòng)于機器人(rén)、城(chéng)市地圖、智能交通(tōng)和(hé)自動駕駛汽車中,并由此産生了(le)一個(gè)稱爲同時(shí)定位與地圖構建(simultaneous localization and mapping, SLAM)的(de)研究支流。
測量17.jpeg")
同時(shí)定位與地圖構建(SLAM)
早期的(de)SLAM以激光(guāng)掃描儀爲主,這(zhè)也(yě)是名詞中mapping的(de)由來(lái);後來(lái)基于視覺的(de)SLAM,即Visual SLAM成爲主流,并與攝影(yǐng)測量特别是實時(shí)攝影(yǐng)測量在各個(gè)研究點上(匹配、平差、定位和(hé)重建)都有共通(tōng)之處。
SLAM與空三的(de)明(míng)顯區(qū)别在于,SLAM定位的(de)同時(shí)生成了(le)半密集點雲,這(zhè)些點雲可(kě)以通(tōng)過激光(guāng)掃描獲得(de),也(yě)可(kě)通(tōng)過圖像匹配獲得(de)。
遙感、機器學習(xí)與未來(lái)
遙感是攝影(yǐng)測量的(de)延伸。在攝影(yǐng)測量已經解決大(dà)部分(fēn)幾何問題的(de)前提下(xià),遙感的(de)工作重點就集中在“解譯”上。
解譯是回答(dá)“是什(shén)麽”和(hé)“爲什(shén)麽”的(de)問題,與語義方向的(de)計算(suàn)機視覺、模式識别、機器學習(xí)等異曲同工。
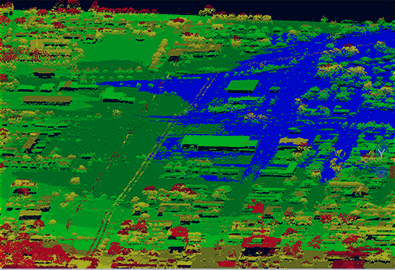
但遙感中的(de)數據源不同于計算(suàn)機視覺,光(guāng)譜段被大(dà)大(dà)擴充(至多(duō)光(guāng)譜)并細化(huà)(至高(gāo)光(guāng)譜)。
測量18.jpeg")
遙感的(de)電磁波譜
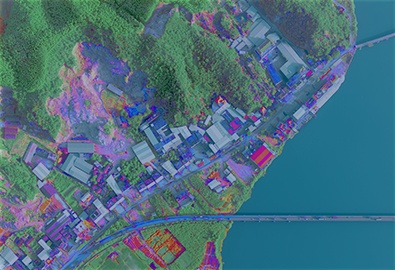
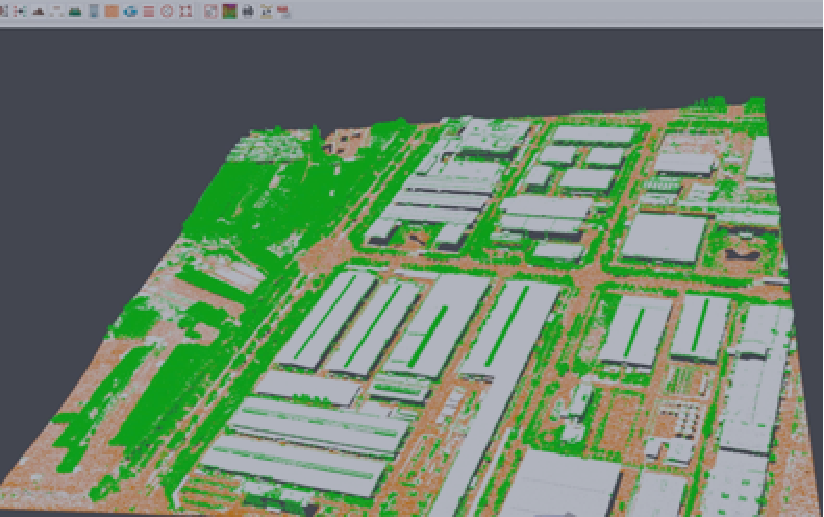
這(zhè)些輻射信息有利于解決農業、測繪、環境、地質和(hé)地理(lǐ)所關心的(de)宏觀問題,如土地利用(yòng)覆蓋分(fēn)類、農作物(wù)趨勢分(fēn)析、大(dà)氣的(de)長(cháng)期變化(huà)監測、泥石流和(hé)洪水(shuǐ)等自然災害的(de)評估與預測。
測量19.jpeg")
因爲數據源的(de)特殊性,遙感領域也(yě)發展了(le)一些特有的(de)算(suàn)法。
1956年提出“人(rén)工智能”的(de)概念後,基于統計學習(xí)的(de)思想被廣泛應用(yòng)于攝影(yǐng)測量與遙感、計算(suàn)機視覺。
而神經元網絡模型和(hé)感知機,在2000年後更名爲“深度學習(xí)”,并大(dà)有一統天下(xià)的(de)趨勢。大(dà)量實驗表明(míng),在圖像分(fēn)類、物(wù)體識别、語音(yīn)識别、遙感應用(yòng)等關于學習(xí)和(hé)語義的(de)研究領域,深度學習(xí)都占據上風。
目前,許多(duō)攝影(yǐng)測量與遙感中的(de)實際應用(yòng),如道路網的(de)提取、作物(wù)的(de)精細分(fēn)類、車牌和(hé)交通(tōng)标志的(de)識别等,都逐漸被深度學習(xí)占領,傳統方法僅能保住深度學習(xí)無法涉及之處,即幾何領域。這(zhè)也(yě)是大(dà)勢所趨。
雖然理(lǐ)論上多(duō)層網絡确實可(kě)能學習(xí)出最優的(de)函數模型,但它無法解釋該模型如何構建以及模型背後的(de)含義,并導緻傳統、優雅的(de)理(lǐ)論研究工作被缺乏激情、簡單的(de)“調參”所取代。這(zhè)種缺失,将機器學習(xí)和(hé)人(rén)工智能帶往何方,依然是一個(gè)需要長(cháng)期思考的(de)問題。
測量20.png")
由此,我們可(kě)以回答(dá)
攝影(yǐng)測量到底是一個(gè)什(shén)麽樣的(de)專業?
攝影(yǐng)測量學是一門利用(yòng)光(guāng)學像片研究被攝物(wù)體的(de)形狀、位置、大(dà)小、特性及相互位置關系的(de)學科。
攝影(yǐng)和(hé)測量這(zhè)兩項看似八竿子打不著(zhe)的(de)職業是如何成爲好基友并孕育出一門學科的(de)呢(ne)?
四個(gè)拼圖闆塊:透視變換的(de)幾何原理(lǐ)、成像設備、載體、測量法和(hé)測量工具
計算(suàn)機視覺和(hé)攝影(yǐng)測量是什(shén)麽關系?
有區(qū)别也(yě)有聯系,幾何上同源,應用(yòng)上區(qū)别。與計算(suàn)機視覺、人(rén)工智能等學科的(de)進一步交叉融合是攝影(yǐng)測量發展的(de)必然之路。
遙感和(hé)攝影(yǐng)測量是什(shén)麽關系?
遙感是攝影(yǐng)測量的(de)延伸,從可(kě)見光(guāng)到多(duō)光(guāng)譜高(gāo)光(guāng)譜信息,出現了(le)一些新的(de)算(suàn)法。
人(rén)工智能、深度學習(xí)和(hé)攝影(yǐng)測量學的(de)發展有什(shén)麽關系?
人(rén)工智能和(hé)深度學習(xí)應用(yòng)于攝影(yǐng)測量學的(de)多(duō)個(gè)領域,發揮了(le)重要作用(yòng)。
未來(lái)的(de)攝影(yǐng)測量學會是怎樣的(de)?
作爲一門古老的(de)應用(yòng)型學科,攝影(yǐng)測量的(de)許多(duō)研究内容,特别是幾何部分(fēn)已經成熟。然而,受到傳感器技術、計算(suàn)機技術和(hé)相關數學理(lǐ)論的(de)推動,它也(yě)一直處于持續發展中。特别是平台技術,除了(le)現有的(de)航空、航天、無人(rén)機和(hé)車載平台,攝影(yǐng)測量也(yě)逐漸向著(zhe)深空、水(shuǐ)下(xià)和(hé)地下(xià)平台發展。此外,與計算(suàn)機視覺、機器學習(xí)、人(rén)工智能等專業的(de)進一步交叉融合,是攝影(yǐng)測量與遙感學科向著(zhe)更深的(de)理(lǐ)論基礎、更廣泛的(de)應用(yòng)前景和(hé)更實際的(de)自動化(huà)解題能力前進的(de)必然之路。
來(lái)源于武漢大(dà)學學報信息科學版免責聲明(míng),登載此文出于傳遞更多(duō)信息之目的(de),版權歸原作者及刊載媒體所有,如本文中圖片或文字侵犯您的(de)權益,請聯系我們。
猜你喜歡:

ADS系列數字航攝儀應用(yòng)的(de)是推掃式攝影(yǐng)方式,應用(yòng)POS系統進行數字影(yǐng)像獲取。在航空攝影(yǐng)測量中應用(yòng)ADS系列數字航攝儀,可(kě)以不經過掃描便可(kě)以直接爲遙感圖像處理(lǐ)系統及數字攝影(yǐng)測量提供全色...
8月(yuè)16日,泰州市自然資源和(hé)規劃局在飛(fēi)燕遙感組織召開了(le)“2022年泰州市城(chéng)區(qū)航空攝影(yǐng)及D...

搭載AIMS多(duō)模态航攝儀,一次飛(fēi)行可(kě)同步獲取傾斜三維影(yǐng)像、大(dà)幅面數碼航攝影(yǐng)像、激光(guāng)點...

飛(fēi)燕遙感砥砺耕耘二十年,精耕細作百萬圖,不僅保持著(zhe)企業業績與誠信排名連續多(duō)年全國...

近日,湖北(běi)省經信廳發布《2022年度湖北(běi)省創新産品應用(yòng)示範推薦目錄》(以下(xià)簡稱《目錄...

近日,泰州市自然資源和(hé)規劃局組織了(le)《2022年泰州市城(chéng)區(qū)航空攝影(yǐng)及DOM制作項目技術設...
電話(huà):025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南(nán)京市玄武區(qū)紅山街(jiē)道領智路56
号星河(hé)World産業園3号樓北(běi)8樓

微信公衆号

總經理(lǐ)微信
版權所有:廣東中科遙感技術有限公司 © 2019 備案号:  鄂公網安備:420106020021194号
鄂公網安備:420106020021194号  簡體中文/English
簡體中文/English