攝影(yǐng)測量學的(de)誕生與深度學習(xí)的(de)起源
攝影(yǐng)測量學是一門“利用(yòng)光(guāng)學像片研究被攝物(wù)體的(de)形狀、位置、大(dà)小、特性及相互位置關系”的(de)學科。攝影(yǐng)測量誕生于19世紀早期。1838年,物(wù)理(lǐ)學家惠斯頓發明(míng)了(le)實體鏡,第一次發現和(hé)定義了(le)立體視覺。1839年,法國畫(huà)家達蓋爾發明(míng)了(le)銀版攝影(yǐng)法,并制作了(le)世界上第一台真正的(de)照(zhào)相機。在此基礎上,法國測量學家Fourcade首先發現了(le)用(yòng)立體照(zhào)片可(kě)重建立體視覺,從而促成了(le)攝影(yǐng)測量學的(de)誕生。攝影(yǐng)測量的(de)第一個(gè)也(yě)是最重要的(de)分(fēn)支是航空攝影(yǐng)測量。
深度學習(xí)起源于20世紀中葉的(de)人(rén)工智能。人(rén)工智能的(de)兩個(gè)主要流派分(fēn)别是符号主義(symbolism)和(hé)聯結主義(connectionism)。其中,符号主義者在1956年首次提出“人(rén)工智能”的(de)概念,并統治了(le)該領域近半個(gè)世紀;基于統計學習(xí)的(de)思想被廣泛應用(yòng)于機器學習(xí)、計算(suàn)機視覺,以及攝影(yǐng)測量與遙感。
攝影(yǐng)測量與深度學習(xí)及計算(suàn)機視覺的(de)聯系
深度學習(xí)的(de)最重要應用(yòng)是在視覺圖像上,如手寫字體識别、自然圖像分(fēn)類和(hé)檢索等。而攝影(yǐng)測量的(de)研究對(duì)象就是視覺圖像,因此深度學習(xí)的(de)成功和(hé)蓬勃發展,使得(de)攝影(yǐng)測量也(yě)成爲最受益的(de)學科之一。
在語義上,攝影(yǐng)測量中的(de)研究内容就是采用(yòng)智能方法爲各行業提供專題圖。攝影(yǐng)測量的(de)應用(yòng)特性使得(de)它并不關心諸如特征描述、上下(xià)文關系等中間結果。這(zhè)種端到端的(de)模式(end-to-end )特别适用(yòng)深度學習(xí)方法。目前,深度學習(xí)已經被廣泛用(yòng)于遙感圖像的(de)分(fēn)類、識别、檢索和(hé)提取。與在幾何方面的(de)欠佳表現不同,在語義上基本全面碾壓了(le)傳統的(de)方法。
1982年,Marr發表《視覺:從計算(suàn)的(de)視角研究人(rén)的(de)視覺信息表達與處理(lǐ)》,是計算(suàn)機視覺的(de)開山之作。計算(suàn)機視覺的(de)最初研究:用(yòng)計算(suàn)機代替人(rén)眼,從圖片中重建3D世界。與攝影(yǐng)測量在幾何方面具有很高(gāo)的(de)重疊度。20世紀90年代,在語義方面計算(suàn)機視覺開始蓬勃開展。其中運用(yòng)了(le)大(dà)量的(de)機器學習(xí)知識。有學者分(fēn)析指出機器學習(xí)與計算(suàn)機視覺重疊度約在60%~70%,因此是非常緊密的(de)兩門學科。
随著(zhe)深度學習(xí)成爲機器學習(xí)的(de)主流,深度學習(xí)在計算(suàn)機視覺中得(de)到廣泛應用(yòng)。将深度學習(xí)引入到攝影(yǐng)測量中,特别是提高(gāo)攝影(yǐng)測量後期語義處理(lǐ)的(de)智能水(shuǐ)平,是科學研究發展的(de)必然途徑。
深度學習(xí)在攝影(yǐng)測量語義方面的(de)應用(yòng)
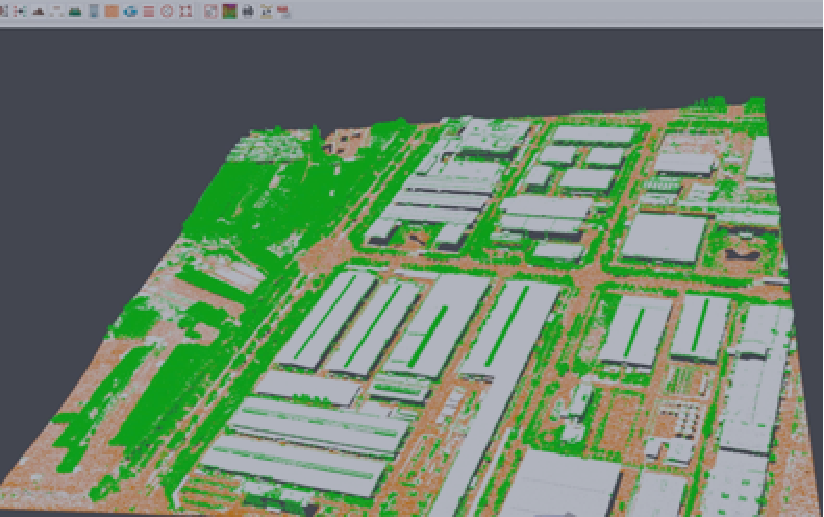
深度學習(xí)在遙感圖像語義提取方面的(de)應用(yòng)剛剛起步并逐漸普及。以下(xià)将從各類地物(wù)語義專題圖出發,回顧深度學習(xí)的(de)具體應用(yòng)。
遙感圖像建築、道路網等地物(wù)的(de)提取一直是數十年來(lái)的(de)熱(rè)門課題。雖然經典方法取得(de)一定的(de)效果,但距離實用(yòng)、市場(chǎng)、商業軟件尚有一定的(de)距離。CNN目前正成爲道路網提取的(de)主流方法。通(tōng)過級聯式端到端CNN同時(shí)實現了(le)道路網提取及道路中心線提取,與其他(tā)方法比較,達到了(le)更高(gāo)的(de)分(fēn)類精度。通(tōng)過CNN結合線積分(fēn)卷積克服了(le)樹木(mù)遮蔽、房(fáng)屋陰影(yǐng)所造成的(de)道路網殘缺問題。通(tōng)過非監督學習(xí)預處理(lǐ)和(hé)空間相關性的(de)應用(yòng),利用(yòng)深度學習(xí)極大(dà)地提高(gāo)了(le)複雜(zá)城(chéng)市場(chǎng)景的(de)道路提取精度。均爲使用(yòng)深度學習(xí)的(de)方法進行道路提取并取得(de)了(le)良好的(de)效果。
建築物(wù)、農作物(wù)、水(shuǐ)體等專題的(de)提取相對(duì)道路而言較少,但預期會有許多(duō)相關文獻近期發表。采用(yòng)CNN實現高(gāo)分(fēn)辨率多(duō)光(guāng)譜衛星影(yǐng)像的(de)建築物(wù)提取。
首先采用(yòng)AlexNet提取特征,最後的(de)全連接層用(yòng)于訓練SVM分(fēn)類器并采用(yòng)MRF模型精化(huà)。作物(wù)精細分(fēn)類是攝影(yǐng)測量與遙感在農業中的(de)重要應用(yòng)。在影(yǐng)像平面上進行2D卷積,在光(guāng)譜方向上進行1D卷積,分(fēn)别提取出影(yǐng)像空間特征和(hé)光(guāng)譜特征,取得(de)了(le)比随機森林(lín)和(hé)全連接MLP更好的(de)作物(wù)分(fēn)類精度。
爲了(le)從本質上解決該問題,需要考慮兩點。
第一點是恰當的(de)遷移學習(xí)方法。目前ImageNet等龐大(dà)的(de)數據庫來(lái)自大(dà)衆攝影(yǐng)圖像,并不包括鳥瞰航攝圖像和(hé)衛星遙感圖像。照(zhào)片的(de)标注諸如人(rén)、大(dà)象或椅子;遙感圖像中的(de)标注諸如耕地、建築、森林(lín)等。若直接将這(zhè)些數據庫訓練得(de)到的(de)模型,用(yòng)來(lái)進行遙感圖像直接分(fēn)類,就要考慮遷移學習(xí)。遷移學習(xí)是将A數據集中訓練好的(de)模型,應用(yòng)在B數據集上。A與B可(kě)能是同源的(de),也(yě)可(kě)能存在巨大(dà)差異。這(zhè)就要進一步發掘完善的(de)遷移學習(xí)機制。
第二點是建立針對(duì)遙感圖像的(de)開源的(de)、完備的(de)标簽數據庫。涵蓋足夠多(duō)的(de)地物(wù)類别,每個(gè)類别包括足夠多(duō)的(de)樣本。這(zhè)樣的(de)數據庫是攝影(yǐng)測量與遙感走向“自動化(huà)專題制圖”的(de)必經之路。然而,實現難度要比千萬圖像級别的(de)ImageNet更大(dà)。首先,由于遠(yuǎn)距成像的(de)特性,圖像受到更多(duō)電磁輻射傳輸的(de)影(yǐng)響。經過大(dà)氣傳播的(de)電磁輻射與地物(wù)間的(de)相互作用(yòng)機理(lǐ)更加複雜(zá),同一标簽的(de)樣本往往呈現明(míng)顯的(de)差異。這(zhè)種差異不但對(duì)樣本的(de)選取造成不便,而且對(duì)深度學習(xí)模型的(de)可(kě)區(qū)分(fēn)性提出更大(dà)的(de)挑戰。
第二,衆包模式并不能完全起作用(yòng)。普通(tōng)人(rén)可(kě)能很好地辨認出的(de)區(qū)别,因此通(tōng)過互聯網衆包能夠快(kuài)速構建一個(gè)巨大(dà)的(de)标注數據庫;但是,小麥和(hé)水(shuǐ)稻在遙感圖像上的(de)差異,則需要專業人(rén)員(yuán)的(de)目視判讀。若影(yǐng)像分(fēn)辨率較低,甚至可(kě)能需要實地調查。
第三,攝影(yǐng)測量與遙感界的(de)科研模式尚需向開源發展。目前,遙感學界已經開始走向開源模式,希望由公司、政府或科研機構能夠在短期内建立的(de)針對(duì)遙感圖像分(fēn)類的(de)标簽數據庫,并實現完全開源。有了(le)足夠的(de)數據标簽庫或恰當的(de)遷移學習(xí)方法,并借助深度學習(xí)的(de)泛化(huà)能力,可(kě)以預期未來(lái)攝影(yǐng)測量與遙感專題制圖的(de)精度将比傳統的(de)特征分(fēn)類方法得(de)到明(míng)顯的(de)改進。
文章(zhāng)來(lái)源于網絡,由飛(fēi)燕遙感www.feiyantech.com編輯。登載此文出于傳遞更多(duō)信息之目的(de),版權歸原作者及刊載媒體所有,如本文中圖片或文字侵犯您的(de)權益,請聯系我們。
猜你喜歡:
測繪4D産品中 DLG 數據是如何生産的(de)?
激光(guāng)LIDAR 航測技術應用(yòng)在河(hé)道測繪
燕微信公衆号.jpg")

ADS系列數字航攝儀應用(yòng)的(de)是推掃式攝影(yǐng)方式,應用(yòng)POS系統進行數字影(yǐng)像獲取。在航空攝影(yǐng)測量中應用(yòng)ADS系列數字航攝儀,可(kě)以不經過掃描便可(kě)以直接爲遙感圖像處理(lǐ)系統及數字攝影(yǐng)測量提供全色...

與傳統的(de)測繪技術相比,高(gāo)空攝影(yǐng)技術可(kě)以對(duì)高(gāo)空大(dà)比例尺的(de)地形圖進行較爲準确的(de)測繪。...
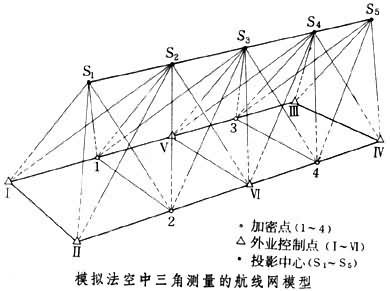
航空攝影(yǐng)測量技術中的(de)空中三角測量,是在立體攝影(yǐng)測量實踐中參照(zhào)少部分(fēn)野外控制點,并...

作爲一種通(tōng)過空間數據得(de)到核心技術處理(lǐ)的(de)綜合技術,技術應用(yòng)過程中需要從技術層面分(fēn)析...
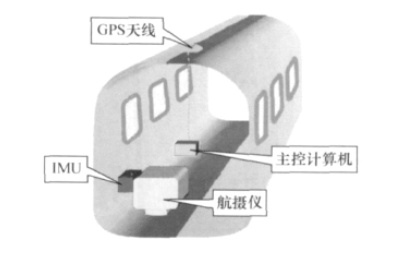
POS輔助空中三角測量的(de)第一步是要采用(yòng)載波相位動态GPS定位技術測定攝站的(de)空間位置(簡...
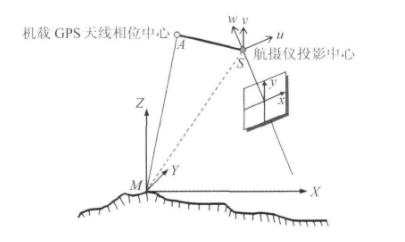
當代航空攝影(yǐng)測量加密方式中的(de)GPS輔助光(guāng)束法區(qū)域網平差,相位中心一般會被放置在航空G...
電話(huà):025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南(nán)京市玄武區(qū)紅山街(jiē)道領智路56
号星河(hé)World産業園3号樓北(běi)8樓

微信公衆号

總經理(lǐ)微信
版權所有:廣東中科遙感技術有限公司 © 2019 備案号:  鄂公網安備:420106020021194号
鄂公網安備:420106020021194号  簡體中文/English
簡體中文/English