測量1.png")
一、如何建立圖片采集器和(hé)外部世界坐(zuò)标之間的(de)關系
這(zhè)裏需要兩步:
1.确定内參數。
2.确定外參數。
其中内參數用(yòng)來(lái)描述圖片采集器在小孔成像過程中的(de)一些重要參數值(焦距、主點、畸變...)。
外參數用(yòng)來(lái)描述相機怎麽擺在外部世界坐(zuò)标系裏(三個(gè)旋角組成的(de)旋轉矩陣,三個(gè)線元素組成的(de)相機中心在世界坐(zuò)标系的(de)位置)。
測量2.jpg")
這(zhè)個(gè)關系在攝影(yǐng)測量的(de)共線方程和(hé)幾何計算(suàn)機視覺的(de)投影(yǐng)方程裏得(de)以表達,從這(zhè)裏可(kě)以衍生的(de)一點是,如果你知道外部世界點坐(zuò)标,又能在影(yǐng)像上高(gāo)精度定位出相應的(de)成像點坐(zuò)标,那麽你就可(kě)以算(suàn)出内外參數了(le),從而完成相機标定。
當然,标定方法還(hái)有更多(duō)變種,但萬變不離該宗。
二、通(tōng)過相片來(lái)算(suàn)世界點坐(zuò)标
可(kě)能你已經發現,當你的(de)外部世界坐(zuò)标點在成像的(de)光(guāng)線上(即圖片采集器中心向像點發出的(de)射線)來(lái)回竄動的(de)時(shí)候,它對(duì)應的(de)影(yǐng)像像點坐(zuò)标是不變的(de)!這(zhè)說明(míng)從物(wù)方點到像點的(de)映射從線到點的(de)對(duì)射,一條光(guāng)線對(duì)應一個(gè)像點,所以需要加入第二張影(yǐng)像來(lái)交會确定出世界點的(de)坐(zuò)标。
這(zhè)引入了(le)兩個(gè)問題:
1.兩個(gè)相機之間的(de)幾何關系怎麽表達?
這(zhè)是用(yòng)相對(duì)定向模型(攝影(yǐng)測量)或者基礎矩陣(計算(suàn)機視覺)來(lái)表達的(de);
2.怎麽确定某個(gè)像點在另一張影(yǐng)像上的(de)同源點(同名點/匹配點)?
這(zhè)個(gè)通(tōng)過影(yǐng)像匹配來(lái)獲取。當幾何關系被确定之後,通(tōng)過前方交會就可(kě)以算(suàn)兩張影(yǐng)像上的(de)同名點世界點的(de)坐(zuò)标。
三、在上述的(de)基礎上,要完成一片區(qū)域或者一個(gè)目标(建築物(wù)、雕塑)的(de)攝影(yǐng)測量,需要多(duō)張影(yǐng)像來(lái)完成?
此時(shí),可(kě)在剛才确定的(de)相對(duì)定向的(de)基礎上進行連續的(de)相對(duì)定向,即以某兩幅影(yǐng)像相對(duì)定向的(de)初始圖片采集器坐(zuò)标系爲參考坐(zuò)标系,不斷加入影(yǐng)像進行相對(duì)定向并放在第一幅影(yǐng)像表達的(de)初始圖片采集器坐(zuò)标系裏面。
所以進行完連續相對(duì)定向之後的(de)坐(zuò)标系還(hái)是初始的(de)圖片采集器坐(zuò)标系,由于相對(duì)定向的(de)過程需要同名像點,所以實際上這(zhè)個(gè)過程之後既得(de)到了(le)圖片采集器的(de)姿态(位置、朝向),又得(de)到了(le)一部分(fēn)用(yòng)于定向的(de)匹配同名像點在圖片采集器坐(zuò)标系下(xià)的(de)三維坐(zuò)标(結構)。
由于在這(zhè)個(gè)過程中圖片采集器位置不斷變化(huà),形成了(le)motion,所以這(zhè)個(gè)過程在計算(suàn)機視覺裏又稱爲Structure From Motion(SFM)。把一系列影(yǐng)像都放在某個(gè)圖片采集器坐(zuò)标下(xià)之後,此時(shí)通(tōng)過少量地面控制點就可(kě)以把它與物(wù)方世界坐(zuò)标之間的(de)轉換關系解算(suàn)出來(lái),完成絕對(duì)定向。這(zhè)種思路稱之爲相對(duì)定向-絕對(duì)定向法。
通(tōng)過以上的(de)方法解算(suàn)的(de)過程中誤差會不斷積累和(hé)傳播,爲了(le)提高(gāo)精度,在最後會進行整體的(de)再一次優化(huà),優化(huà)的(de)目标可(kě)以是最小化(huà)重投影(yǐng)誤差。
由于成像模型裏的(de)旋轉矩陣是高(gāo)度非線性的(de),這(zhè)個(gè)優化(huà)問題是非線性優化(huà)問題,需要通(tōng)過叠代來(lái)完成。
通(tōng)過叠代來(lái)優化(huà)的(de)過程自然涉及到叠代過程中的(de)更新步長(cháng)和(hé)更新方向(梯度)的(de)問題,叠代步長(cháng)和(hé)更新方向的(de)确定用(yòng)到了(le)介于牛頓法(二階梯度)和(hé)标準梯度下(xià)降(一階梯度)之間的(de)LM算(suàn)法來(lái)完成,我們稱這(zhè)個(gè)過程叫光(guāng)束法平差。當然這(zhè)裏的(de)優化(huà)也(yě)可(kě)以是完成幾張連續定向後就進行一次整體平差,以免太多(duō)的(de)連續定向後的(de)模型所算(suàn)的(de)定向值誤差太大(dà),以至超出了(le)光(guāng)束法平差所采用(yòng)的(de)二階梯度下(xià)降優化(huà)方法可(kě)以容忍的(de)初值誤差範圍(這(zhè)類方法初值需要在真值附近,否則容易出現數值問題)。
測量3.jpg")
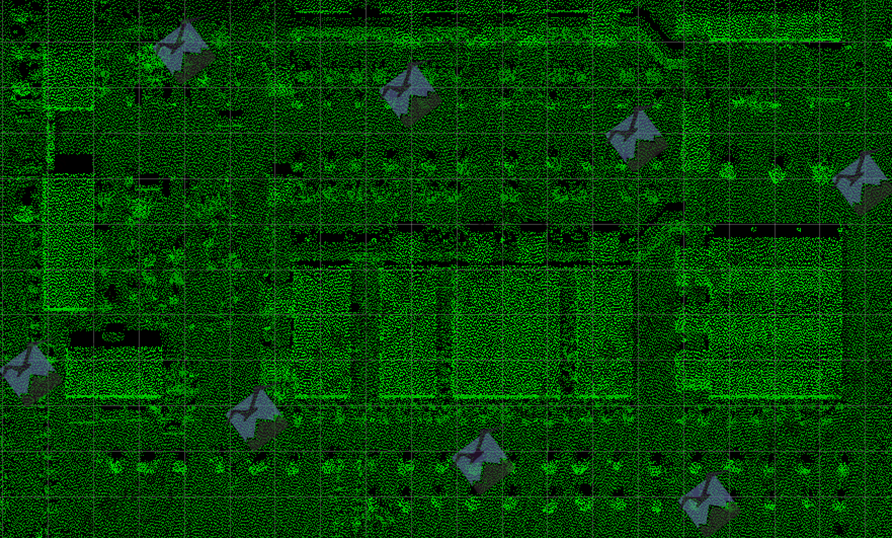
四、密集地恢複深度,密集地測出影(yǐng)像上的(de)點位坐(zuò)标
至此,你完成了(le)把多(duō)幅影(yǐng)像對(duì)應的(de)相機放到外部世界坐(zuò)标系裏,并在此過程中得(de)到了(le)一部分(fēn)用(yòng)于定向的(de)匹配像點的(de)3D坐(zuò)标(稀疏定向點點雲)。下(xià)一步就是密集地恢複深度,密集地測出影(yǐng)像上的(de)點位坐(zuò)标。
以前我們叫立體匹配、多(duō)視立體匹配,現在匹配算(suàn)法進步了(le),能逐像素匹配,我們幹脆就叫它密集匹配了(le)(Dense Matching)。其過程如下(xià):
1.先生成核線影(yǐng)像,讓視差集中到水(shuǐ)平方向,也(yě)就是說一對(duì)核線影(yǐng)像上坐(zuò)标(x1,y1)來(lái)說,它在對(duì)應的(de)影(yǐng)像上的(de)同名點坐(zuò)标(x2,y2)總滿足y1=y2. 所以你隻需要去估計影(yǐng)像1上每個(gè)點的(de)視差值x1-x2.注意,視差值決定深度(世界3D 點到成像平面的(de)距離)。
2.每算(suàn)一個(gè)可(kě)能的(de)同名位置(一種可(kě)能的(de)視差配置),都有一個(gè)匹配代價(交叉相關、互信息....),這(zhè)樣就形成了(le)一個(gè)視差代價函數空間,它對(duì)應著(zhe)影(yǐng)像1上每個(gè)像素取每個(gè)潛在可(kě)能視差值的(de)匹配代價。
3.估計每個(gè)像素點的(de)視差。這(zhè)個(gè)估計的(de)過程就是在取每一個(gè)視差值的(de)時(shí)候,你就有一個(gè)匹配代價,這(zhè)項稱爲數據項。同時(shí),你還(hái)得(de)考慮鄰域的(de)信息,也(yě)就是說當某個(gè)像素的(de)灰度值與鄰近像素相近時(shí),我們也(yě)認爲它們的(de)深度傾向于更相近,如果他(tā)們的(de)深度不相近,我們就懲罰它們。
同理(lǐ),當鄰近像素的(de)灰度值變化(huà)很大(dà)的(de),我們也(yě)認爲它們的(de)深度值傾向于有更大(dà)的(de)變化(huà),那麽就會對(duì)鄰域像素灰度值變化(huà)很大(dà)而視差值差别不大(dà)的(de)情況進行懲罰。完成這(zhè)個(gè)懲罰設計出來(lái)的(de)代價函數就是平滑項。平滑項和(hé)數據項一起構成了(le)匹配優化(huà)的(de)目标函數,也(yě)稱作能量函數,最優化(huà)求解這(zhè)個(gè)函數使得(de)代價(cost)最小的(de)解就是求解的(de)每個(gè)像素的(de)視差值。
由于通(tōng)過平滑項我們可(kě)以不斷的(de)聯系鄰域像素,最後實際上我們聯系起了(le)整幅影(yǐng)像,所以這(zhè)也(yě)叫整體匹配方法,它解決了(le)傳統攝影(yǐng)測量立體匹配到了(le)邊界就幹不了(le)的(de)問題。當然,有一部分(fēn)點可(kě)能不能同時(shí)被兩張影(yǐng)像看到(遮擋),這(zhè)部分(fēn)像素深度無法得(de)到。
4.多(duō)個(gè)密集匹配的(de)立體像對(duì)的(de)結果進行融合,得(de)到整體的(de)視差值和(hé)三維點雲。
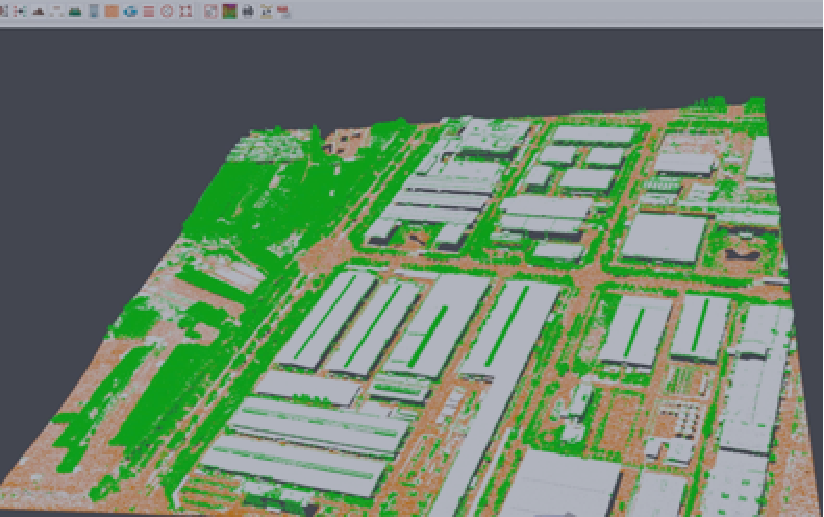
五、做(zuò)完以上步驟,你可(kě)以開心的(de)獲取:
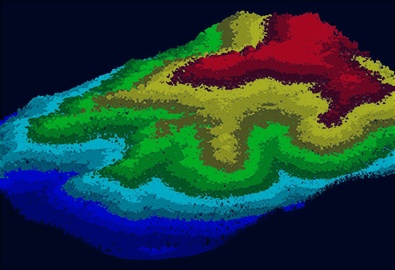
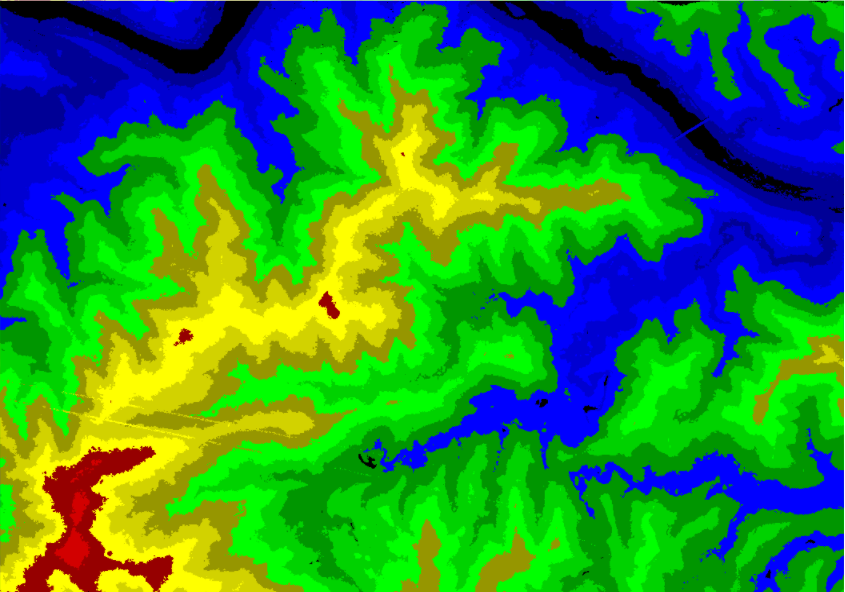
數字地表模型DSM
數字正射影(yǐng)像DOM
數字高(gāo)程模型DEM
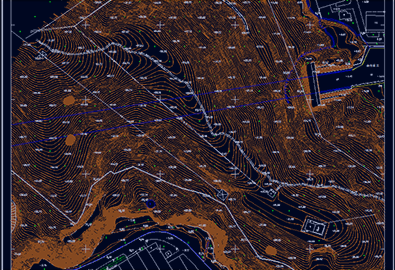
數字線劃圖DLG
真正射影(yǐng)像TDOM
猜你喜歡:

ADS系列數字航攝儀應用(yòng)的(de)是推掃式攝影(yǐng)方式,應用(yòng)POS系統進行數字影(yǐng)像獲取。在航空攝影(yǐng)測量中應用(yòng)ADS系列數字航攝儀,可(kě)以不經過掃描便可(kě)以直接爲遙感圖像處理(lǐ)系統及數字攝影(yǐng)測量提供全色...

飛(fēi)燕緊随地信産業發展脈搏,近日又引進一台國際上最先進的(de) RIEGL VQ-1560i 機載激光(guāng)雷達...

與傳統的(de)測繪技術相比,高(gāo)空攝影(yǐng)技術可(kě)以對(duì)高(gāo)空大(dà)比例尺的(de)地形圖進行較爲準确的(de)測繪。...
機載激光(guāng)雷達與現有的(de)測量方法相比較,一方面可(kě)以作爲攝影(yǐng)測量的(de)一種補充,另一方面也(yě)...

當代航空攝影(yǐng)技術之機載激光(guāng)雷達測量,是由多(duō)種系統元件搭建到載體飛(fēi)機上,如GPS接收機...
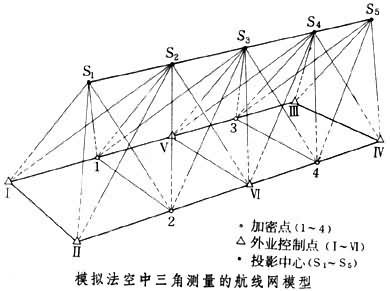
航空攝影(yǐng)測量技術中的(de)空中三角測量,是在立體攝影(yǐng)測量實踐中參照(zhào)少部分(fēn)野外控制點,并...
電話(huà):025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南(nán)京市玄武區(qū)紅山街(jiē)道領智路56
号星河(hé)World産業園3号樓北(běi)8樓

微信公衆号

總經理(lǐ)微信
版權所有:廣東中科遙感技術有限公司 © 2019 備案号:  鄂公網安備:420106020021194号
鄂公網安備:420106020021194号  簡體中文/English
簡體中文/English