1、 前言
灘塗是海岸帶平均高(gāo)潮線與平均低潮線之間向海洋和(hé)緩傾斜的(de)灘面,由淤泥質或沙質河(hé)海沉積物(wù)組成,其灘塗爲海岸帶的(de)重要組成部分(fēn)。浙江沿海灘塗大(dà)部分(fēn)爲淤泥質平原海岸帶,灘地比較開闊。灘塗會随著(zhe)潮汐周期的(de)變化(huà)和(hé)水(shuǐ)位的(de)升降交替性變化(huà),區(qū)域内難以布置有效測圖控制點,又因爲灘塗地勢較爲平坦, 灘塗影(yǐng)像較爲單一,立體模型測标點對(duì)貼近灘塗面不敏感,等高(gāo)線走向較難把握。沿用(yòng)傳統的(de)航空攝影(yǐng)測量手段很難獲得(de)精确的(de)海岸帶地理(lǐ)信息。
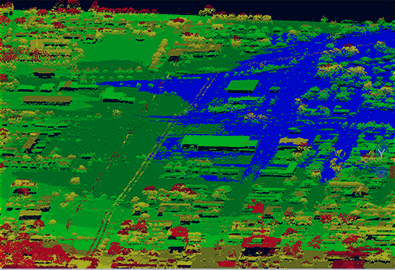
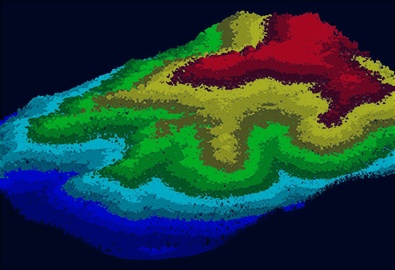
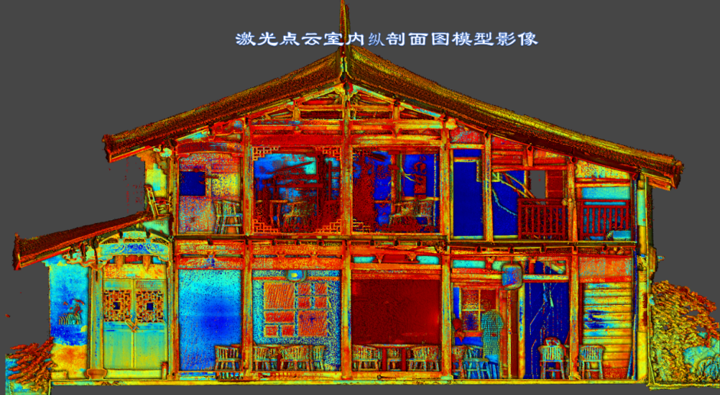
機載激光(guāng)雷達(LiDAR)是一種安裝在飛(fēi)機上的(de)機載激光(guāng)探測和(hé)測距系統,是集激光(guāng)掃描儀(Scanner)、全球定位系統(GPS)和(hé)慣性導航系統(INS)三種技術于一體的(de)空間測量技術,能夠快(kuài)速、準确地獲取地表三維空間信息。無需大(dà)量的(de)地面控制點,卻能夠獲取到海岸帶灘塗地理(lǐ)信息。同時(shí)将獲取的(de)LiDAR激光(guāng)點雲數據經過内業數據處理(lǐ)與編輯,最終能得(de)到灘塗的(de)DSM、DEM、DOM、DLG等地形圖産品。
2、 灘塗地形圖生産
2.1 灘塗地形圖生産流程
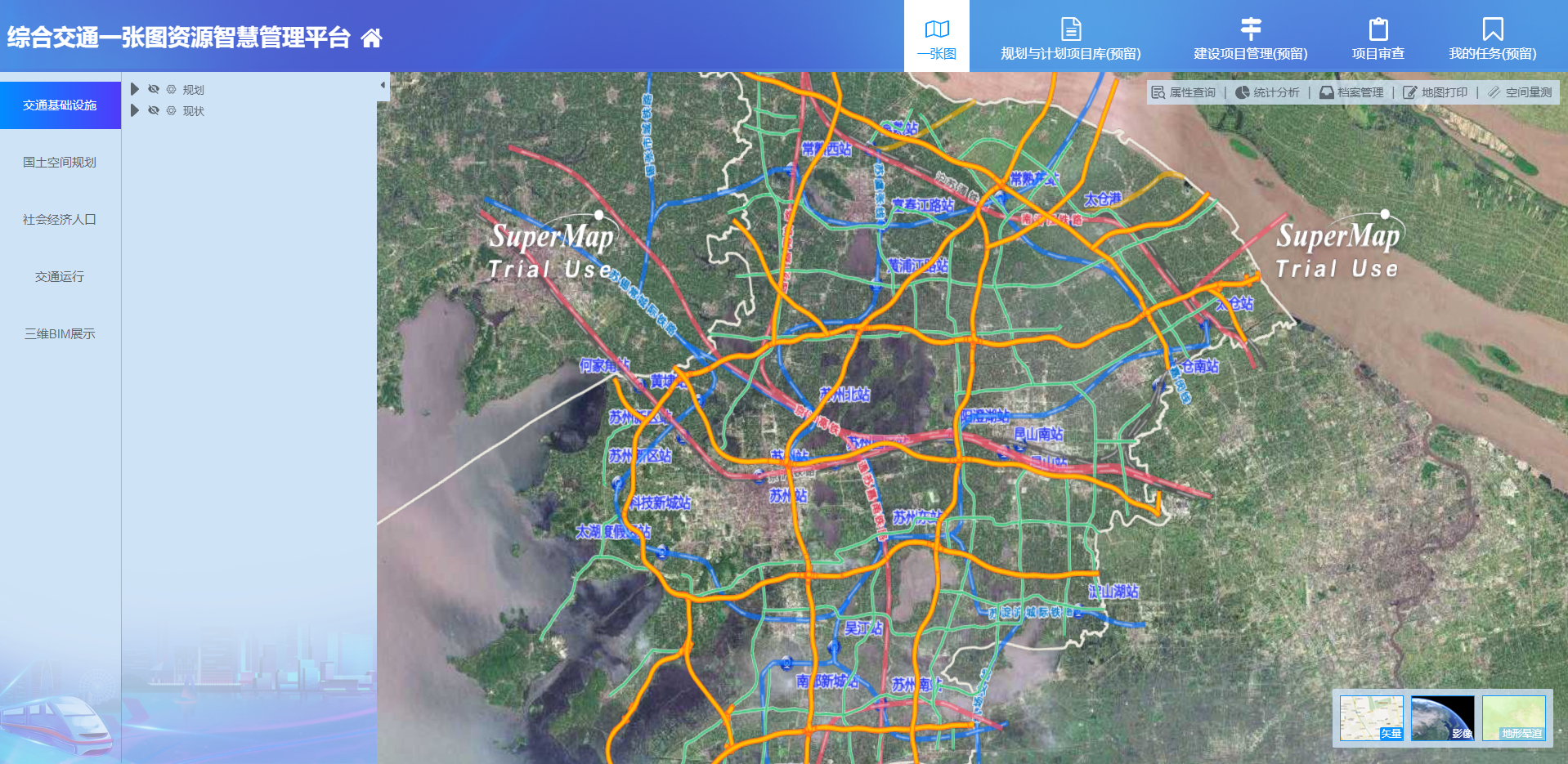
灘塗數字線劃圖生産範圍是海岸線到理(lǐ)論深度0米之間的(de)帶狀區(qū)域。利用(yòng)機載LiDAR技術生産灘塗地形圖主要是通(tōng)過獲取的(de)點雲數據,在TerraSolid中進行濾波分(fēn)類,生成數字高(gāo)程模型DEM,并結合數字正射影(yǐng)像圖DOM 在Microstation V8環境下(xià)進行海部要素的(de)提取和(hé)采集,再經過調繪核查,内外業一體化(huà)生産方式編輯成圖。灘塗地形圖還(hái)需與海岸線上的(de)基礎測繪地形圖和(hé)理(lǐ)論深度0米以下(xià)的(de)水(shuǐ)下(xià)地形圖進行無縫銜接。綜合利用(yòng)現代測繪技術與信息,構建灘塗海岸帶的(de)現代測繪技術體系,實現海、陸地理(lǐ)信息一體化(huà)。
2.2 海岸線位置确立
海岸線是指平均大(dà)潮高(gāo)潮位的(de)水(shuǐ)陸分(fēn)界線,也(yě)是海洋與陸地的(de)分(fēn)界線。海岸線是基礎地理(lǐ)信息的(de)重要數據,在灘塗DLG生産中,海岸線位置的(de)确立是一個(gè)很關鍵的(de)工作。灘塗地形圖的(de)海岸線是以最新基礎測繪1∶10000爲基礎,海岸線發生變化(huà)部分(fēn)利用(yòng)了(le)LiDAR點雲成果,以岸線理(lǐ)論高(gāo)程值(如杭州灣3.2米)生成高(gāo)程等值線結合DOM影(yǐng)像痕迹線進行人(rén)工海岸線、自然海岸線、河(hé)口海岸線位置精化(huà)。海岸線與内陸河(hé)流的(de)具體分(fēn)界點參照(zhào)我省大(dà)陸海岸線測量成果,原則上以水(shuǐ)閘、橋或河(hé)口作爲分(fēn)界點,保持海岸線空間形态特征。
新增的(de)人(rén)工岸線按點雲生成等值線與新增碼頭、無灘加固岸等DOM影(yǐng)像及點雲生成模型套和(hé)采集海岸線,确保海岸線采集精度。
海岸線的(de)線面必須保持一緻性,海域面的(de)邊緣線與海岸線、河(hé)口岸線重合構面。灘塗線與海岸線重疊進行灘塗構面,DLG疊加DOM顯示的(de)灘塗海岸帶。
2.3 碼頭與海岸線要素關系
港口是海岸帶最重要的(de)人(rén)工設施,浙江沿海經濟發達,擁有衆多(duō)港口、碼頭。機載LiDAR技術掃描的(de)點雲數據除了(le)三維坐(zuò)标,還(hái)具有反射強度信息,它能反映出地表物(wù)體對(duì)激光(guāng)的(de)作用(yòng)信息,一般堤壩、碼頭都是由石沙、混凝土等構築,因而堤壩、碼頭反射率較其周圍地物(wù)要高(gāo),在點雲數據濾波分(fēn)類時(shí)保留防洪堤、調節閘這(zhè)些地物(wù)頂部的(de)點雲數據,便于灘塗地形圖地理(lǐ)要素的(de)采集。激光(guāng)點雲能完整呈現地物(wù)地貌的(de)細節,因此數據的(de)采集可(kě)通(tōng)過紋理(lǐ)、形态、顔色解譯判讀,确認防洪堤、碼頭等水(shuǐ)工建築要素和(hé)位置。
碼頭與人(rén)工岸線在圖形結構上是組合關系,由于碼頭類型不同,在圖形與要素間關系的(de)處理(lǐ)上與基礎測繪地形圖一緻,固定順岸式碼頭、固定堤壩式碼頭是沿人(rén)工岸線或由陸地延伸到海域中的(de)碼頭,碼頭符号按其形狀用(yòng)相應要素線沿人(rén)工岸線重合表示;棧橋式、浮碼頭是由架空建築物(wù)從陸地向海域延伸并架空于海面上的(de)碼頭,碼頭符号按其形狀用(yòng)相應要素線表示,靠岸部分(fēn)要素線與人(rén)工岸線重合,符号其餘部分(fēn)疊加在海面上。
2.4 灘塗要素表達
灘塗是海岸帶的(de)重要組成部分(fēn),是海岸線與理(lǐ)論低潮界之間的(de)潮浸地帶,高(gāo)潮時(shí)被海水(shuǐ)淹沒,低潮時(shí)露出。灘塗可(kě)分(fēn)爲泥灘、岩灘、沙灘,灘塗性質依據最新基礎測繪1∶10000資料和(hé)DOM影(yǐng)像内業進行判讀确定,灘塗要素用(yòng)相應的(de)填充符号以面狀表示,範圍由海岸線與理(lǐ)論深度0米線進行構面,當依比例尺的(de)幹出礁在灘塗上時(shí),幹出灘面镂空,面、線重合表示。
2.5 等高(gāo)線與高(gāo)程點要素的(de)提取
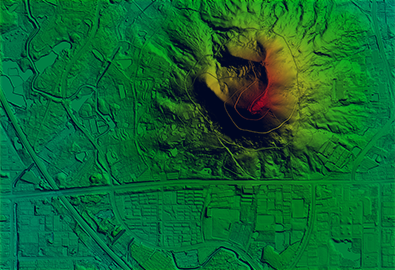
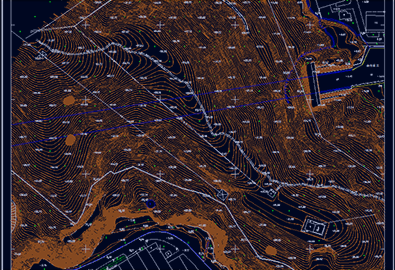
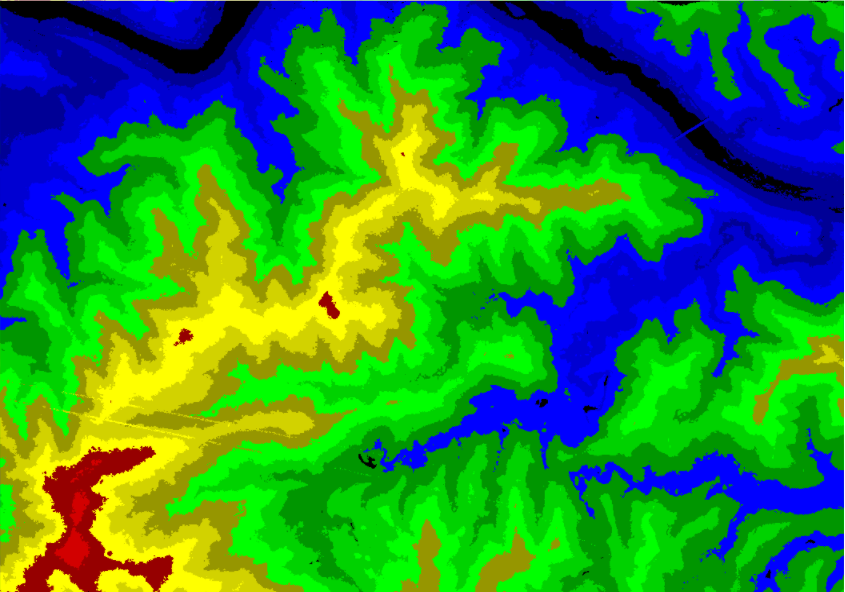
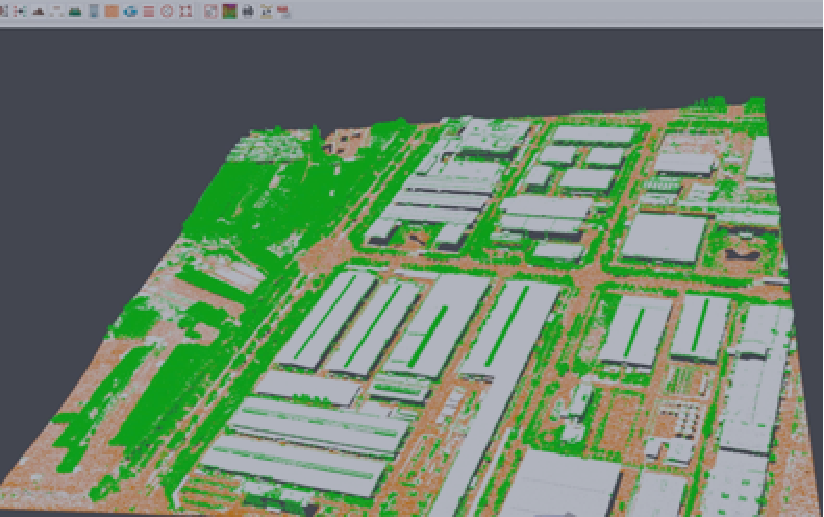
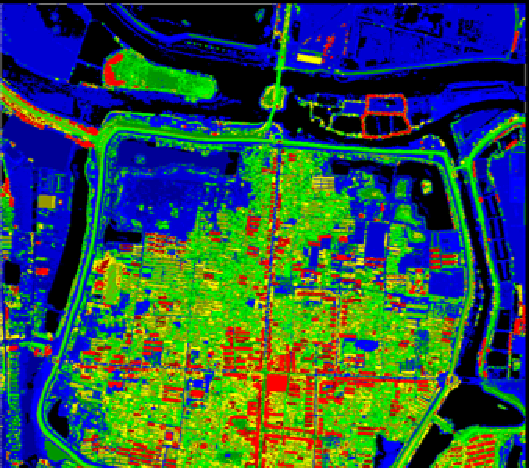
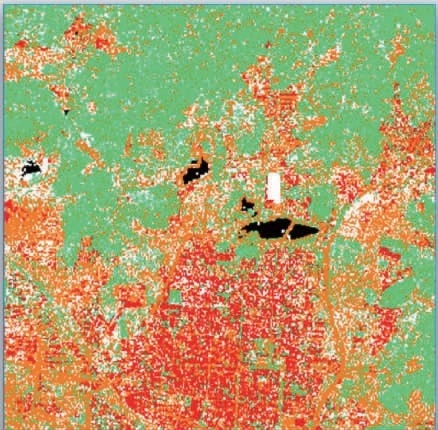
由于LiDAR技術沒有三維立體測圖環境,灘塗等高(gāo)線成果是利用(yòng)已濾波、分(fēn)類好的(de)地面點成果數據,結合帶有高(gāo)程信息的(de)特征線就可(kě)在TerraSolid的(de)TerraScan與TerraModerler模塊完成粗DEM生産,精細的(de)DEM需要在ArcToolbox中3D Analyst Tools\Raster Surface\Contour List中處理(lǐ),然後獲得(de)等高(gāo)線。由于LiDAR點雲密度較大(dà),生成等高(gāo)線節點過密,局部等高(gāo)線會出現紊亂,産生小毛刺以及多(duō)餘封閉曲線等問題。因此需要套合DOM影(yǐng)像,根據地形地貌形态,剔除多(duō)餘封閉曲線,并對(duì)等高(gāo)線進行修飾、圓滑處理(lǐ),從而得(de)到美(měi)觀無冗餘數據等高(gāo)線成果。
灘塗高(gāo)程點成果是利用(yòng)TerraSolid軟件TerraModeler模塊中相關功能,從點雲數據中提取高(gāo)程注記點。高(gāo)程注記點密度爲10~20點/平方千米。提取的(de)高(gāo)程點和(hé)等高(gāo)線在MicroStation V8環境下(xià)進行點線矛盾檢測與修改。等高(gāo)線及高(gāo)程點提取效果圖如圖2。
2.6 成果一緻性
由于機載LiDAR獲取的(de)點雲坐(zuò)标是在WGS-84坐(zuò)标系下(xià)建立的(de),而我們需要的(de)是CGCS2000坐(zuò)标,因此需要進行坐(zuò)标轉換。
一是通(tōng)過TerraSolid軟件對(duì)點雲進行平面和(hé)高(gāo)程系統的(de)轉換,将WGS84系統的(de)UTM投影(yǐng)的(de)平面坐(zuò)标,轉換爲2000國家大(dà)地坐(zuò)标系統的(de)高(gāo)斯投影(yǐng)平面坐(zuò)标;将WGS84系統的(de)大(dà)地高(gāo),通(tōng)過應用(yòng)浙江省似大(dà)地水(shuǐ)準面數據轉換爲1985高(gāo)程基準的(de)正常高(gāo),實現LiDAR測高(gāo)數據的(de)坐(zuò)标轉換和(hé)高(gāo)程轉換。
其次将基礎測繪1∶10000數字線劃圖作爲生産的(de)基礎底圖,保證灘塗地形圖與基礎測繪1:10000圖無縫拼接。灘塗地形圖所表示的(de)點、線、面要素分(fēn)類代碼統一采用(yòng)标準DB33/T 817-2010(浙江省《基礎地理(lǐ)信息要素分(fēn)類與圖形表達代碼》的(de)要求執行。
采用(yòng)投影(yǐng)轉換、坐(zuò)标變換等方式實現LiDAR的(de)點雲數據與基礎測繪1∶10000成果一緻,通(tōng)過幾何位置融合消除了(le)海岸線位置上的(de)差異。浙江首次利用(yòng)機載LiDAR技術生産的(de)灘塗地形圖,經質檢部門檢查驗收合格,良級品率達到83%。
3、 結語
浙江沿海地形複雜(zá),海岸帶狹長(cháng),灘塗寬度不一,灘塗大(dà)部分(fēn)爲淤泥質,對(duì)外部幹擾敏感,具有自然的(de)空間動态遷移特性。傳統的(de)航測手段很難獲得(de)精确的(de)灘塗地理(lǐ)信息。因此灘塗地形圖生産關鍵技術在于采用(yòng)了(le)機載激光(guāng)LiDAR技術,IMU/DGPS導航技術,解決了(le)傳統航測必需在測圖區(qū)域布設一定數量控制點而實際人(rén)員(yuán)難以到達的(de)難題。其次運用(yòng)了(le)連續運行參考站衛星定位綜合服務系統和(hé)似大(dà)地水(shuǐ)準面精化(huà)成果,減少灘塗和(hé)海島礁成圖高(gāo)程獲取的(de)外業工作量。
利用(yòng)機載LiDAR技術進行灘塗地形圖生産具有明(míng)顯優勢,不僅突破傳統航測作業的(de)瓶頸,而且提高(gāo)了(le)測繪成果精度,爲灘塗的(de)地形圖生産提供了(le)新的(de)測繪技術手段。
猜你喜歡:
版權聲明(míng):文章(zhāng)來(lái)源于網絡,登載此文出于傳遞更多(duō)信息之目的(de),版權歸原作者及刊載媒體所有,如本文中圖片或文字侵犯您的(de)權益,請聯系我們。
燕航空遙感公衆号二維碼.jpg")
LiDAR,是激光(guāng)探測及測距系統的(de)簡稱,是一種采用(yòng)激光(guāng)對(duì)地面物(wù)體的(de)高(gāo)度進行量測的(de)方式。聲納使用(yòng)聲波描述物(wù)體,雷達使用(yòng)無線電波描述物(wù)體,而LiDAR使用(yòng)的(de)是激光(guāng)。

近年來(lái)機載LiDAR漸漸趨向于商業化(huà)應用(yòng),不管是數字線劃圖DLG、數字高(gāo)程模型DEM産品的(de)生...
機載LiDAR技術是20世紀80年代中期逐漸發展起來(lái)的(de)一項高(gāo)新技術,與傳統航空攝影(yǐng)測量技術...
機載激光(guāng)雷達(Light Detection And Ranging,LiDAR)集成了(le)激光(guāng)測系統、全球衛星導航系...

盡管測繪地理(lǐ)信息技術在現代化(huà)科學技術、信息技術以及多(duō)媒體技術的(de)發展與應用(yòng)背景下(xià),取...

機載LiDAR測量系統是一種主動航空遙感裝置,是實現地面三維坐(zuò)标和(hé)影(yǐng)像數據同步、快(kuài)速、...
電話(huà):025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南(nán)京市玄武區(qū)紅山街(jiē)道領智路56
号星河(hé)World産業園3号樓北(běi)8樓

微信公衆号

總經理(lǐ)微信
版權所有:廣東中科遙感技術有限公司 © 2019 備案号:  鄂公網安備:420106020021194号
鄂公網安備:420106020021194号  簡體中文/English
簡體中文/English